Minh Duc Vu

Планирование траектории

MPC(model predictive control)

ROS 8 Библиотеки и тесты

ROS Лекция 21 Particle filter. Локализация Monte Carlo. Филтр Rao-Blackwell. Grid SLAM

ROS Лекция 20 Локализацие МР по особым точкам с помощью EKF SLAM Алгоритм EKF SLAM

ROS Лекция 19 Фильтр Калмана. Расширенный фильтр Калмана. EKF. Фильтр Калмана "Без запаха".

ROS Лекция 18 Построение карты по данным дальномера. Фильтр Баеса

ROS Лекция 17 Методы локальной навигации. Frontend для SLAM. Алгоритм ICP. RANSAC

ROS Лекция 16 Локализация мобильного робота по особенным точкам. Mapping SLAM. Методы Scan-Matching

ROS Лекция 10 Работа с изображениями. Использование OpenCV.

ROS 9 Работа с модулем навигации Библиотека ActionLib

ROS 7 Система поддержки преобразований координат

ROS 6 Классы - шаблоны

ROS 5 Управление роботом с возможностью выбора алгоритма

ROS Лекция 9 Практическое задание часть 2

ROS Лекция 9 Работа с модулем навигации Библиотека ActionLib

ROS Лекция 9 Практическое задание часть 1

ROS Лекция 8 Библиотеки и тесты часть 2

ROS Лекция 8 Библиотеки и тесты часть 1

ROS Лекция 7 Практическое задание

ROS Лекция 7 Система поддержки преобразований координат

ROS Лекция 6 Классы шаблоны часть 2
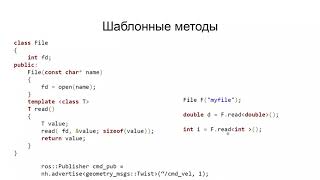
ROS Лекция 6 Классы шаблоны часть 1

ROS Лекция 5 Практическое задание

ROS Лекция 5 Классы, объекты наследование

ROS 5 Управление роботом с возможностью выбора алгоритма

ROS 4 Управление движением робота вдоль траектории

ROS 3 Ссылки, указатели и ООП

ROS 2 Управление моделью мобильного робота

ROS 1 Обмен сообщениями