Mahdi Tavakoli
Mahdi Tavakoli is a professor in the Department of Electrical and Computer Engineering at the University of Alberta, Canada. Mahdi Tavakoli’s research interests broadly involve the areas of robotics and systems control. Specifically, his research focuses on haptics and teleoperation control, medical robotics, and image-guided surgery. Dr. Tavakoli is the first author of the book “Haptics for Teleoperated Surgical Robotic Systems” (2008).
Personal Website: http://www.ece.ualberta.ca/~mtavakol
Lab website: http://www.ece.ualberta.ca/~tbs
Social media hub: https://mahdi-tavakoli.github.io

Learning Autonomous Surgical Irrigation and Suction with dVRK Using Reinforcement Learning

Smart Walker Control: Enhancing Usability for Stroke Survivors with Unilateral Upper Limb Impairment

From Decision to Action in Surgical Autonomy: Multi-Modal LLMs for Robot-Assisted Blood Suction

A Novel Approach for Precise Tissue Tracking in Breast Lumpectomy

Optimal Integration of Hybrid FES-Exoskeleton for Precise Knee Trajectory Control

Evaluating Gait Symmetry with a Smart Robotic Walker: A Novel Approach to Mobility Assessment

Label-Free Adaptive Gaussian Sample Consensus for Learning from Perfect and Imperfect Demonstrations

Autonomous Blood Suction for Robot-Assisted Surgery

Robotic Assistance and Haptic Feedback in Arthroscopic Procedures

Augmented Reality-Based Tumor Localization and Visualization for Robot-Assisted Breast Surgeries

EMG-Based Intention Detection Using Deep Learning For Shared Control In Upper-Limb Exoskeletons

Iterative Learning for Gravity Compensation in Impedance Control

A Realistic Surgical Simulator for Non-Rigid and Contact-Rich Manipulation in Surgeries with dVRK
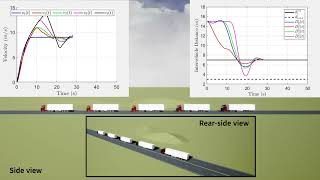
Stability and Intervehicle Distance Analysis of Vehicular Platoons

EMG-Based Intention Detection Using Deep Learning for Shared Control in Assistive Exoskeletons

Robot Learning Incorporating Human Interventions for Autonomous Surgical Endoscopic Camera Control

A brief survey of observers for disturbance estimation and compensation

Point-Based 3D Virtual Fixture Generating for Image-Guided and Robot-Assisted Surgery in Orthopedics

NN Learning of Robot Dynamic Uncertainties & Observer-Based External Disturbance Estimation

Point-Based 3D Virtual Fixture Generating for Image-Guided and Robot-Assisted Surgery in Orthopedics

Registration of Deformed Tissue: A GNN-VAE Approach with Data Assimilation for Sim-to-Real Transfer

Deep Reinforcement Learning based Personalized Locomotion Planning for Lower-Limb Exoskeletons

Point-Based 3D Virtual Fixture Generation for Image-Guided/Robot-Assisted Surgery in Orthopedics

Safe and Efficient Reinforcement Learning for Surgical Robots

Sim-to-Real Surgical Robot Learning and Autonomous Planning using Reinforcement Learning

Wheeled Mobile Manipulators and Exoskeletons for Intelligent Mobility Assistance

Robotic Learning in Rehabilitation Applications

Domain-Adapted Machine Learning for Visual Evaluation of Robot-Assisted Surgery Skills

Domain-Adapted Machine Learning for Visual Evaluation of Robot-Assisted Surgery Skills

Impedance Control and Nonlinear Disturbance Observer for Robot-Assisted Arthroscope Control