MAFarooqi

NCS - 42 - Backstepping control for strict feedback systems

NCS - 35 - Вибрация в режиме скользящего управления

NCS - 34c - Sliding Mode Control for Pendulum - Simulation Results

NCS - 41 - Bacstepping Control - General Case - more than two states

NCS - 40a - Backstepping Control - Basic Concept

NCS - 40b - Контроль возврата - Пример

NCS - 37 - Chattering reduction in SMC (Approach 2)

NCS - 36b - Уменьшение вибрации - Демонстрация MATLAB

NCS - 36a - Chattering Reduction (Approach 1)

NCS - 34d - Sliding Mode Control explained with phase portraits

NCS - 34b - Sliding Mode Control - Example of Pendulum

NCS - 34a - Sliding Mode Control - Basic Concept

NCS - 19b - Examples: Invariance Set Theorem

NCS - 19a - Теорема Ла-Саля об инвариантности множества

НКС-18б - Метод Красовского для устойчивости

NCS-18a - Выбор кандидата на функцию Ляпунова

NCS - 17b - Examples of Global Asymptotic Stability

NCS-17a - Глобальная асимптотическая устойчивость - Теорема Ляпунова

NCS - 16b - Examples: Application of Lyapunov Stability Theorem

НКС - 16а - Теорема Ляпунова об устойчивости, Энергетическая концепция, Определенность функций

LCS-53c - Представление уравнений состояния в диагональной канонической форме (DCF)

LCS - 53b - Observable Canonical Form (OCF) and signal flow graphs

LCS-53a - Модели пространства состояний в управляемой канонической форме (CCF)

LCS - 52b - Графы потоков сигналов для моделей пространства состояний

LCS-52a - Пространство состояний для передаточной функции
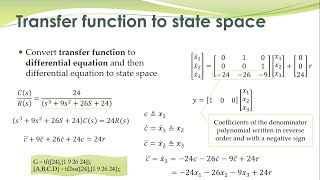
LCS - 51 - Differential equation to state-space, transfer function to state-space, block diagrams

NCS - 30 - Two more examples of input-output linearization

LCS - 50 - State variables and state equations

NCS - 32 - Stabilization and tracking problem using feedback linearization

NCS - 29 - Internal dynamics, zero dynamics, and example of input-output linearization