Скачать
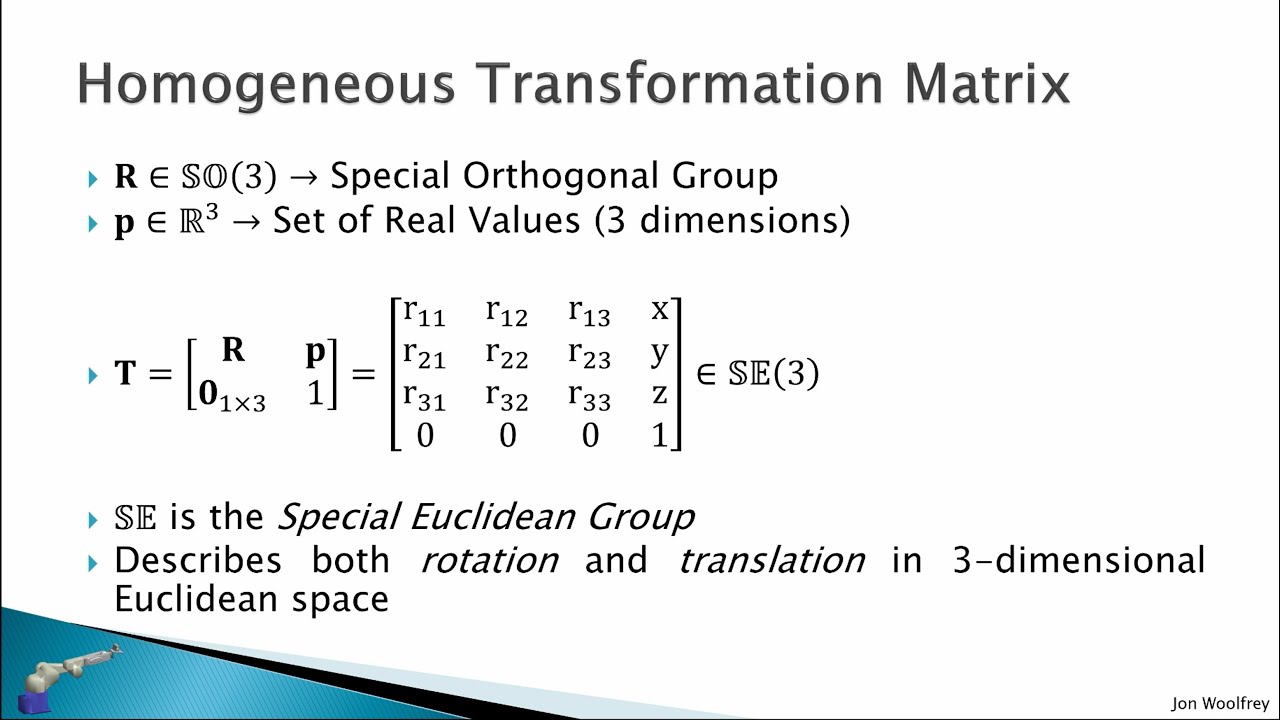
3.1 Transformation Matrices
Автор: Woolfrey
Загружено: 2018-08-02
Просмотров: 17359
Описание:
In this lecture, I introduce the concept of a transformation matrix which combines a rotation matrix in the Special Orthogonal group SO(3), and a translation vector in 3D Euclidean space. I develop the inverse of a transformation matrix, show how to perform point transformations between frames, and chain transformation matrices to find the relative transform between reference frames in a given scenario.
Доступные форматы для скачивания:
Скачать видео mp4
-
Информация по загрузке:






![Суть линейной алгебры: #13. Смена базиса [3Blue1Brown]](https://image.4k-video.ru/id-video/P2LTAUO1TdA)