Step by step archaeological artefact surface analysis (GOM Inspect, CloudCompare, Meshlab)
Автор: nazg
Загружено: 2017-04-23
Просмотров: 2949
Software list (free):
Gom Inspect 2016 (http://www.gom.com/3d-software/gom-in... )
CloudCompare (http://www.danielgm.net/cc/)
Meshlab (http://www.meshlab.net/)
UPDATE: More information here: http://digitime.nazg.org/index.php/20...
(I will finish it by the end of the week)
#1. Initial alignment (not shown in the video)
Each element has been scanned with a GOM Atos Core.
Tete (head) from Autun (France)
Oreille (ear) from Autun (France)
The potery itself (Cera_nurbs) is the byproduct of a nurb revolution from a curve (Autodesk Maya). The curve itself is only the best profile extracted from "Tete" mesh (not shown in the video).
Goals of the analysis:
Extracting modeling patterns
Understanding how potery were made and if both elements are part of the same artefact.
##2. Surface comparison from smoothed models. (01:00 - 04:02)
Patterns can easily be highlighted by producing a smooth low poly mesh from the original mesh and running surface comparison between the two of them.
##3. Defect maps (04:02 - 16:40)
Another possibility is to use the "defect map surface" built-in tool.
Since it is a plane based tool, the obvious drawback is that the more the object is curved, the more the information is distorded.
It's possible to get past this problem by running multiple analysis: surface wise analysis and then reducing the area by curve treshold (time consuming).
##4. Roughness analysis (16:40 - 24:00)
It is quantified by the deviations in the direction of the normal vector of a real surface from its ideal form. If these deviations are large, the surface is rough; if they are small, the surface is smooth (wiki).
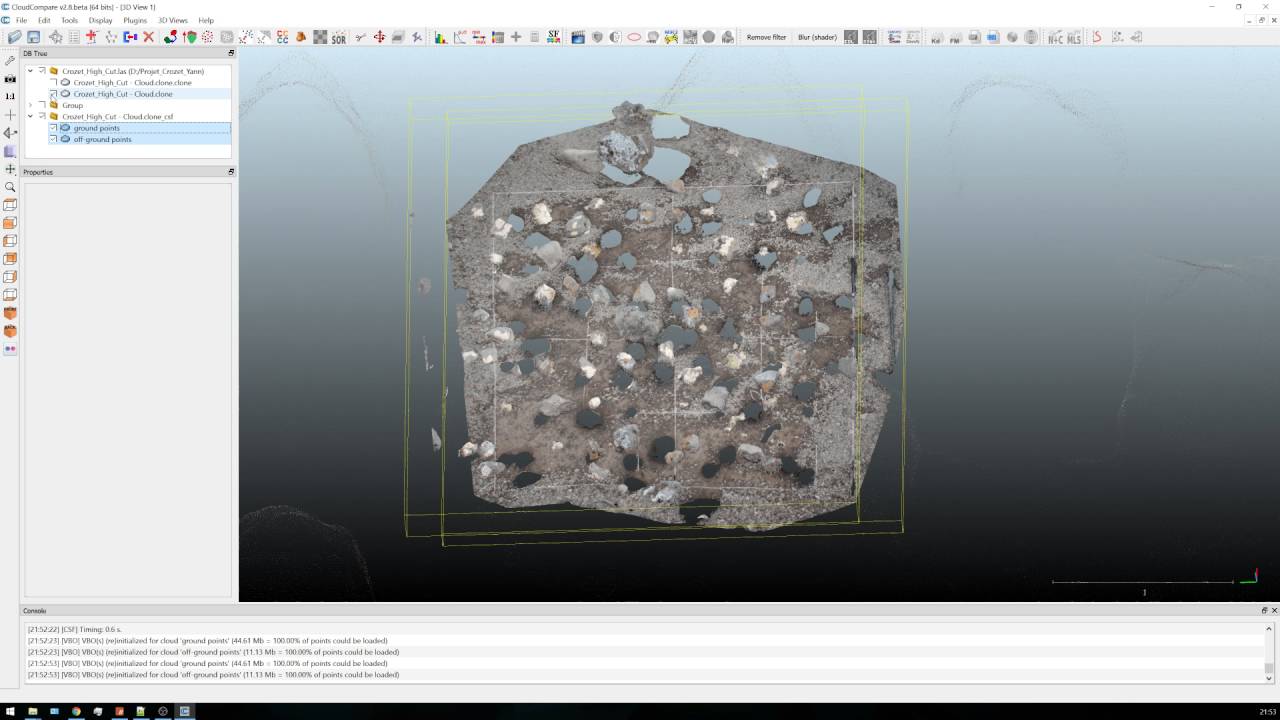
##5. Registration with ICP (Iterative Closest Point) (24:00 - End)
We are using this method to evaluate similarities between two point clouds.
Point Clouds provide the most reliable representation of reality. The representation is what was sensed, without interpolation or modeling errors. Measurements in pointclouds are more reliable when compared to derived models.
We will use the entire surface to compute the fitness of curvature surface wise.
Then, we will segment the surface by extracting the two relevant patterns (single band, gap, then double band).
##6. (next video) Online visualization of results through custom 3DHOP viewer, allowing non specialist to inspect the data.

Доступные форматы для скачивания:
Скачать видео mp4
-
Информация по загрузке: