Технология управления AGV | Автоматизированное управляемое транспортное средство (AGV) | Направля...
Автор: Engineering Study Materials
Загружено: 2019-07-03
Просмотров: 13348
Технология управления AGV | Автоматически управляемое транспортное средство (AGV) | Проводной провод | МАТЕРИАЛЫ ДЛЯ ИНЖЕНЕРНЫХ ИССЛЕДОВАНИЙ
Автоматически управляемое транспортное средство (AGV) — это портативный робот, который движется вдоль размеченных длинных линий или проводов на полу или использует для навигации радиоволны, видеокамеры, магниты или лазеры. Чаще всего они используются в промышленности для транспортировки тяжелых материалов по крупным промышленным зданиям, таким как заводы или склады. Применение автоматически управляемых транспортных средств расширилось в конце XX века.
Навигация
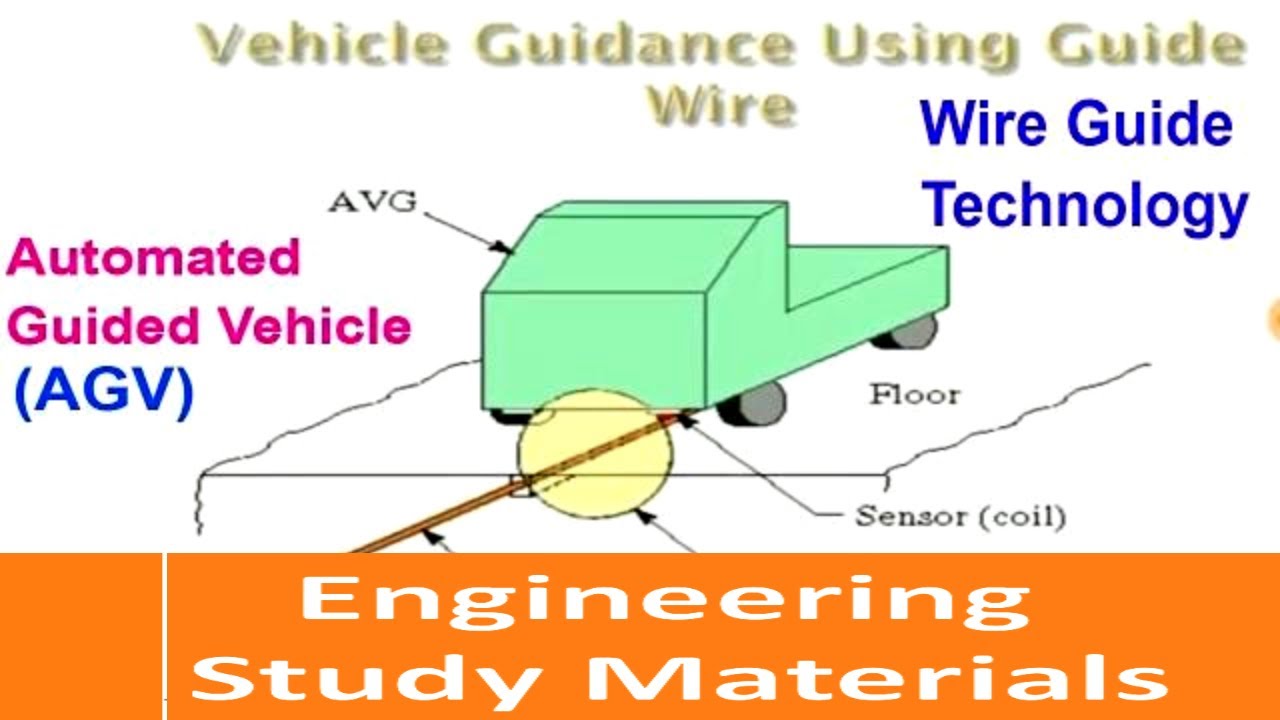
Проводная
В полу прорезается паз, через который прокладывается провод на глубине примерно 2,5 см. Этот паз прорезается по траектории движения AGV. Этот провод используется для передачи радиосигнала. Датчик устанавливается на днище AGV близко к земле. Датчик определяет относительное положение радиосигнала, передаваемого по проводу. Эта информация используется для управления контуром рулевого управления, позволяя AGV следовать за проводом.
Направляющая лента
В роботизированных тележках (некоторые из них известны как автоматически управляемые тележки или AGC) для указания траектории используется лента. Ленты могут быть двух типов: магнитные или цветные. Роботизированная тележка оснащена соответствующим датчиком направления, который отслеживает траекторию ленты. Одним из основных преимуществ ленты по сравнению с проводным наведением является то, что ее можно легко снять и переместить, если…
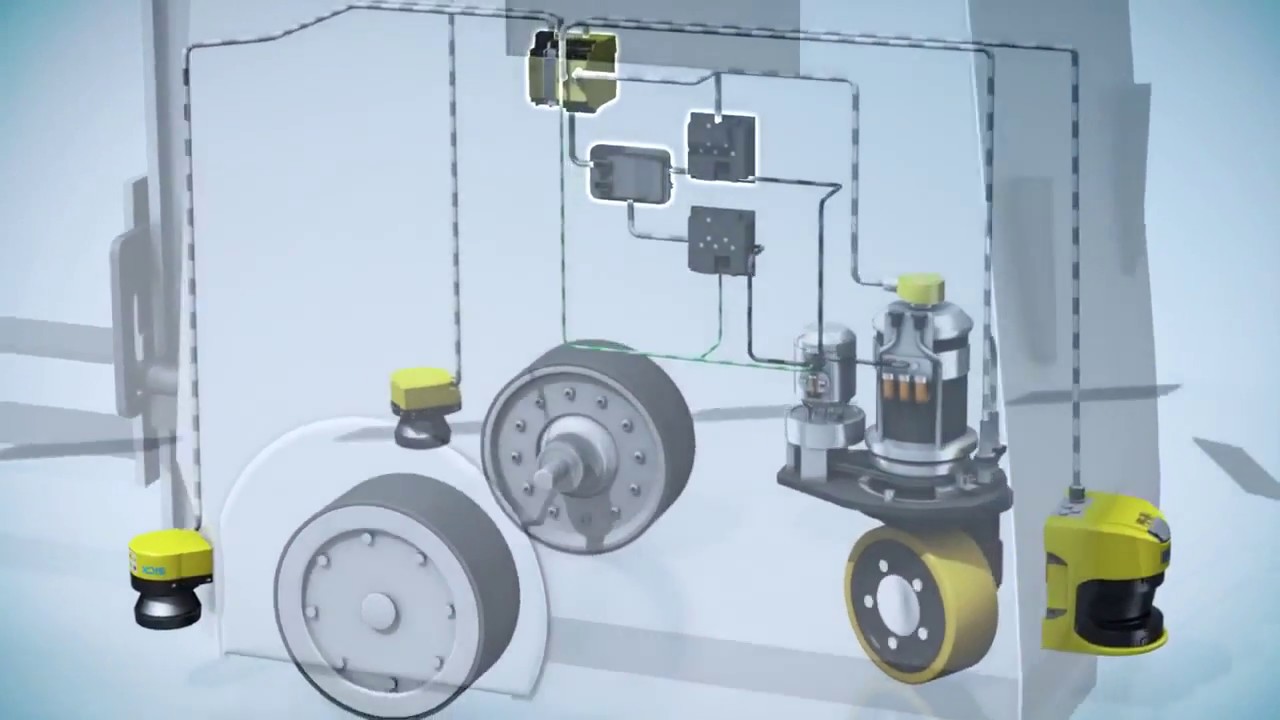
Модулированные лазеры. Использование модулированного лазерного излучения обеспечивает большую дальность и точность по сравнению с импульсными лазерными системами. Излучая непрерывный поток модулированного лазерного излучения, система может получить непрерывное отражение, как только сканер достигает линии визирования с отражателем. Отражение прекращается на задней кромке отражателя, что обеспечивает точное и стабильное измерение от каждого отражателя при каждом сканировании. Используя модулированный лазер, система может достичь углового разрешения ~ 0,1 мрад (0,006°) при 8 оборотах сканера в секунду. Импульсные лазеры. Типичный импульсный лазерный сканер излучает импульсный лазерный свет с частотой 14 400 Гц, что обеспечивает максимально возможное разрешение ~ 3,5 мрад (0,2°) при 8 оборотах сканера в секунду. Для достижения работоспособной навигации показания необходимо интерполировать на основе интенсивности отраженного лазерного света, чтобы определить центр отражателя. Теги:
Системы наведения AGV, технологии наведения AGV, системы датчиков транспортного средства, беспилотные управляемые транспортные средства, беспилотные управляемые транспортные средства, технологии наведения транспортных средств в AGV, наведение транспортных средств и прокладка маршрутов, система лазерного наведения AGV, лекция по системам наведения транспортных средств, беспилотные управляемые транспортные средства на Amazon, AGV в работе, системы наведения транспортных средств на хинди, беспилотные управляемые транспортные средства на складе, установка беспилотных управляемых транспортных средств, беспилотные управляемые транспортные средства в больнице. Системы наведения AGV, технологии наведения AGV, системы датчиков транспортного средства, беспилотные управляемые транспортные средства, беспилотные управляемые транспортные средства, технологии наведения транспортных средств в AGV, наведение транспортных средств и прокладка маршрутов, система лазерного наведения AGV, лекция по системам наведения транспортных средств, беспилотные управляемые транспортные средства на Amazon, AGV в работе, системы наведения транспортных средств на хинди, беспилотные управляемые транспортные средства на складе, установка беспилотных управляемых транспортных средств, беспилотные управляемые транспортные средства в больнице.
#Материалы_для_исследований_в_инженерии
Доступные форматы для скачивания:
Скачать видео mp4
-
Информация по загрузке: