Скачать
4 | Используйте метод корневого местоположения для настройки ПИД-регулятора
Автор: Carbon Aeronautics
Загружено: 2023-04-22
Просмотров: 11289
Описание:
Полный код и руководство на GitHub: https://github.com/CarbonAeronautics
В этом видео вы узнаете, как использовать метод корневого годографа для математической оптимизации ПИД-регулятора.
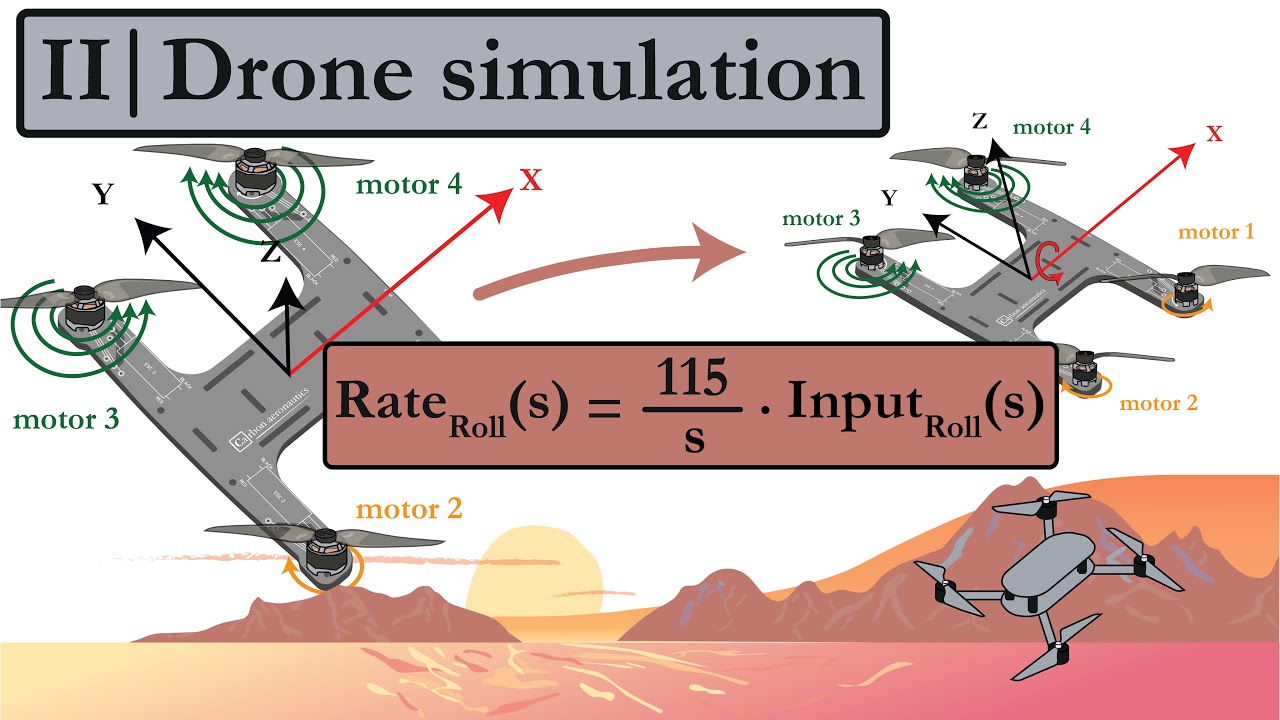
Цель этой серии видео — изучить базовую математику, лежащую в основе квадрокоптера, и помочь вам самостоятельно оптимизировать его управление, разделив этот сложный проект на несколько простых для понимания частей.
Доступные форматы для скачивания:
Скачать видео mp4
-
Информация по загрузке: