Building Forest Inventories with Autonomous Legged Robots - Supplementary Mission Demonstrations
Автор: Oxford Dynamic Robot Systems Group
Загружено: 2025-06-26
Просмотров: 966
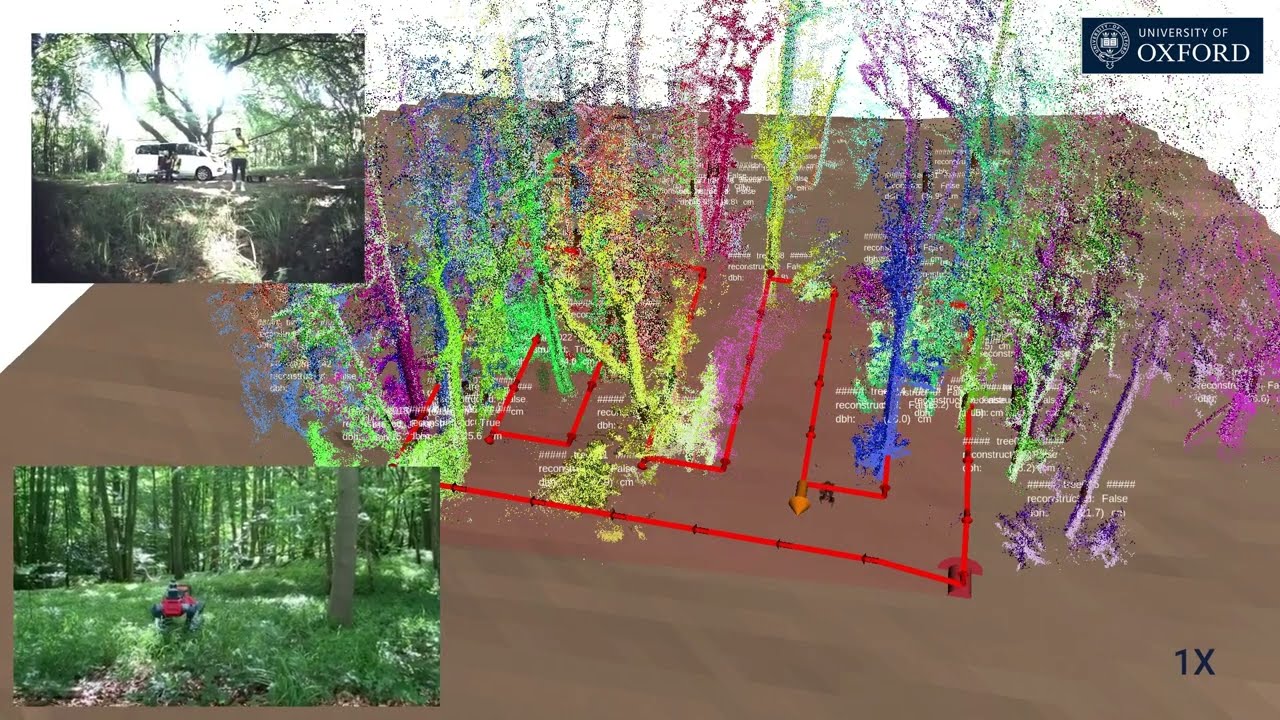
Legged robots are increasingly being adopted in industries such as oil, gas, mining, nuclear, and agriculture. However, new challenges exist when moving into natural, less-structured environments, such as forestry applications. This paper presents a prototype system for autonomous, under-canopy forest inventory with legged platforms. Motivated by the robustness and mobility of modern legged robots, we introduce a system architecture which enabled a quadruped platform to autonomously navigate and map forest plots. Our solution involves a complete navigation stack for state estimation, mission planning, and tree detection and trait estimation. We report the performance of the system from trials executed over one and a half years in forests in three European countries. Our results with the ANYmal robot demonstrate that we can survey plots up to 1 ha plot under 30 min, while also identifying trees with typical DBH accuracy of 2cm. The findings of this project are presented as five lessons and challenges. Particularly, we discuss the maturity of hardware development, state estimation limitations, open problems in forest navigation, future avenues for robotic forest inventory, and more general challenges to assess autonomous systems. By sharing these lessons and challenges, we offer insight and new directions for future research on legged robots, navigation systems, and applications in natural environments.
Accepted for IEEE Transactions on Field Robotics
Authors: Matías Mattamala, Nived Chebrolu, Jonas Frey, Leonard Freißmuth, Haedam Oh, Benoit Casseau, Marco Hutter, Maurice Fallon
Pre-print: https://arxiv.org/abs/2506.20315
Paper: https://ieeexplore.ieee.org/document/...
Project page: https://dynamic.robots.ox.ac.uk/proje...
Sections
00:00 Introduction
00:10 Campaign: Evo, Finland (May 2023)
02:50 Campaign: Forest of Dean, UK (February 2024)
07:54 Campaign: Wytham Woods, UK (June 2024)
11:01 Campaign: Stein am Rhein, Switzerland (July 2024)
Доступные форматы для скачивания:
Скачать видео mp4
-
Информация по загрузке:

![Мы получили 2,5 млн рублей чтобы сделать экзоскелет, и это наконец закончилось [2/2]](https://image.4k-video.ru/id-video/X3uZq2joiW8)