Learning-Enabled Iterative Convex Optimization for Safety-Critical Model Predictive Control
Автор: Shuo Leo FutureTech
Загружено: 2025-08-04
Просмотров: 37
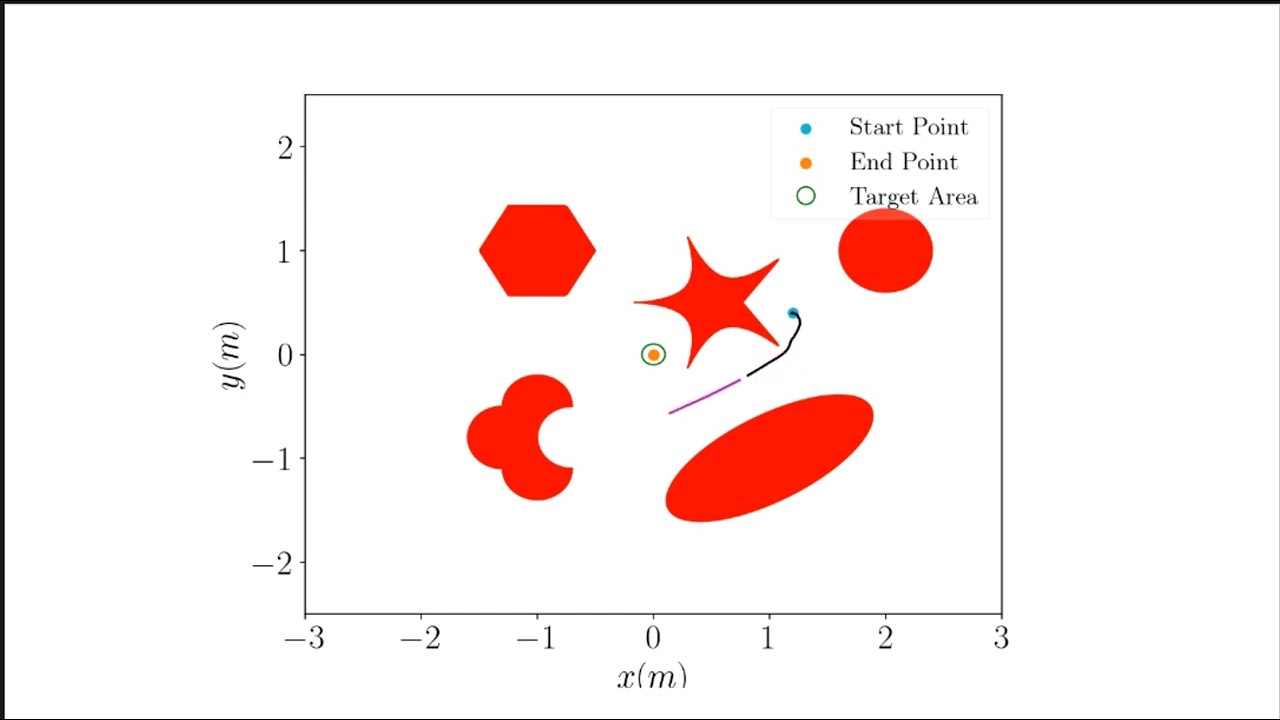
Safety remains a central challenge in control of dynamical systems, particularly when the boundaries of unsafe sets are complex (e.g., nonconvex, nonsmooth) or unknown. This paper proposes a
learning-enabled framework for safety-critical Model Predictive Control (MPC) that integrates Discrete-Time High-Order Control Barrier Functions (DHOCBFs) with iterative convex optimization. Unlike existing methods that primarily address CBFs of relative degree one with fully known unsafe set boundaries, our approach generalizes to arbitrary relative degrees and addresses scenarios where only samples are available for the unsafe set boundaries. We extract pixels from unsafe set boundaries and train a neural
network to approximate local linearizations. The learned models are incorporated into the linearized DHOCBF constraints at each time step within the MPC framework. An iterative convex optimization procedure is developed to accelerate computation while maintaining formal safety guarantees. The benefits of computational performance and safe avoidance of obstacles with diverse shapes are examined and confirmed through numerical results. By bridging model-based control with learning-based environment
modeling, this framework advances safe autonomy for discrete-time systems operating in complex and partially known settings.
The paper can be found at: https://arxiv.org/abs/2409.08300 and is scheduled to appear in the 2025 IEEE OPEN JOURNAL OF CONTROL SYSTEMS (OJ-CSYS) under Special Section on Intersection of Machine Learning with Control.
Доступные форматы для скачивания:
Скачать видео mp4
-
Информация по загрузке:



















