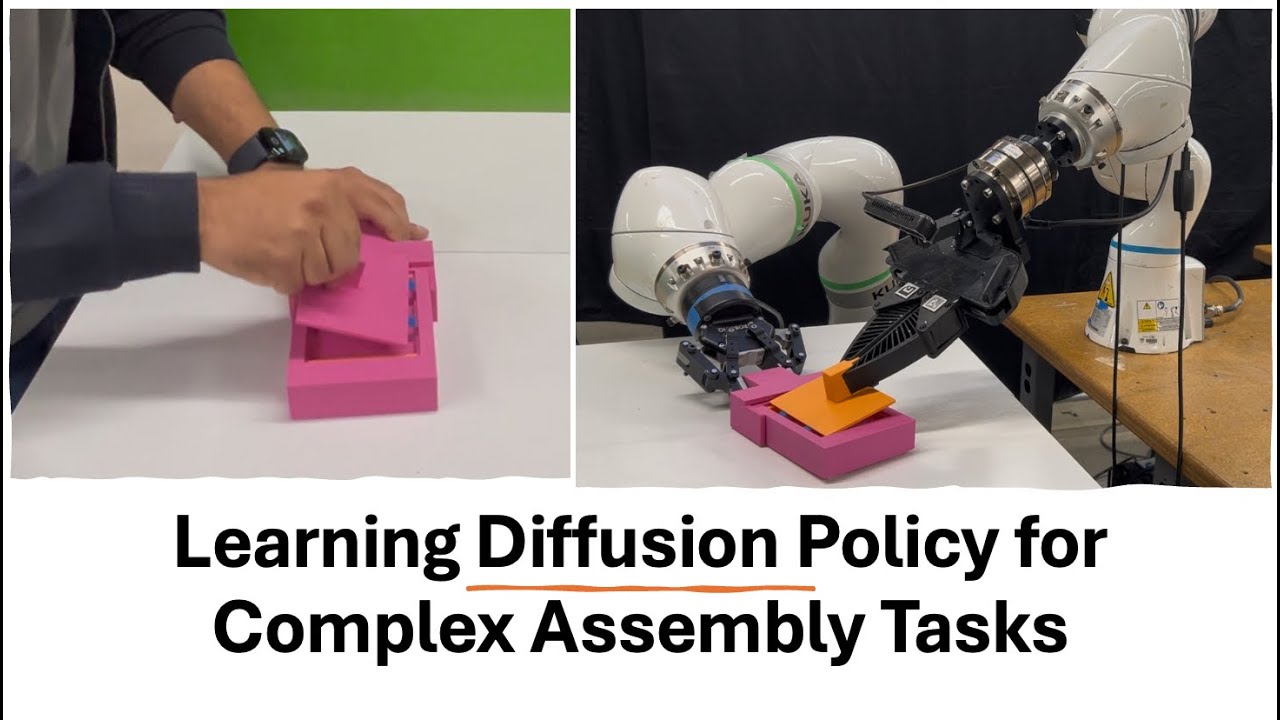
Learning Force-Conditioned Visuomotor Diffusion Policy for Complex Robotic Assembly Tasks
Автор: CAM USC Viterbi
Загружено: 2024-12-06
Просмотров: 862
Assembly operations in manufacturing, especially those involving precise alignment and force control, pose significant challenges for automation. Tasks like fitting a battery cover onto a housing require careful manipulation to ensure proper alignment and insertion without causing damage. We propose leveraging imitation learning by collecting demonstrations through hand-guided manipulation, capturing both vision and force/torque data from sensors mounted on the robot's end-effector. These demonstrations are used to train a bimanual robotic system where one arm holds the battery housing securely while the other inserts the top cover. To enable this, we extend the diffusion policy framework by incorporating real-time force feedback and visual observations. Additionally, we introduce data segmentation and augmentation methods to reduce the number of required demonstrations, enhancing the policy's robustness to task failures. Our results show that the proposed method, even with a small dataset, achieves high success rates and efficiency compared to standard diffusion techniques.
Доступные форматы для скачивания:
Скачать видео mp4
-
Информация по загрузке:








![Мы получили 2,5 млн рублей чтобы сделать экзоскелет, и это наконец закончилось [2/2]](https://image.4k-video.ru/id-video/X3uZq2joiW8)










