Скачать
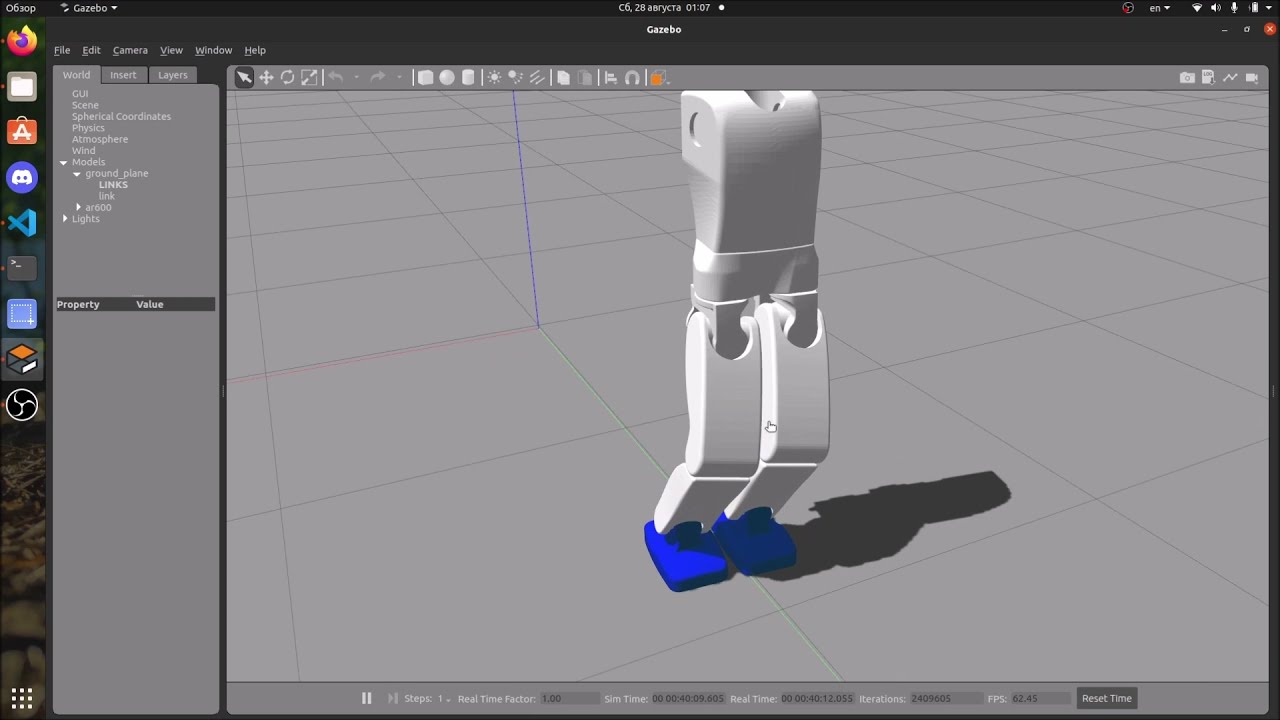
AR600 Humanoid Robot forward walk experiments with LIPM in Gazebo
Автор: Павел Тарасов
Загружено: 2021-08-27
Просмотров: 657
Описание:
Experiments with adjustable step length walking in forward direction. The Linear Inverted Pendulum Model (LION) with Single Support Phaze is used. You can find source code there:
https://github.com/tarasradio/humanoi...
Доступные форматы для скачивания:
Скачать видео mp4
-
Информация по загрузке: