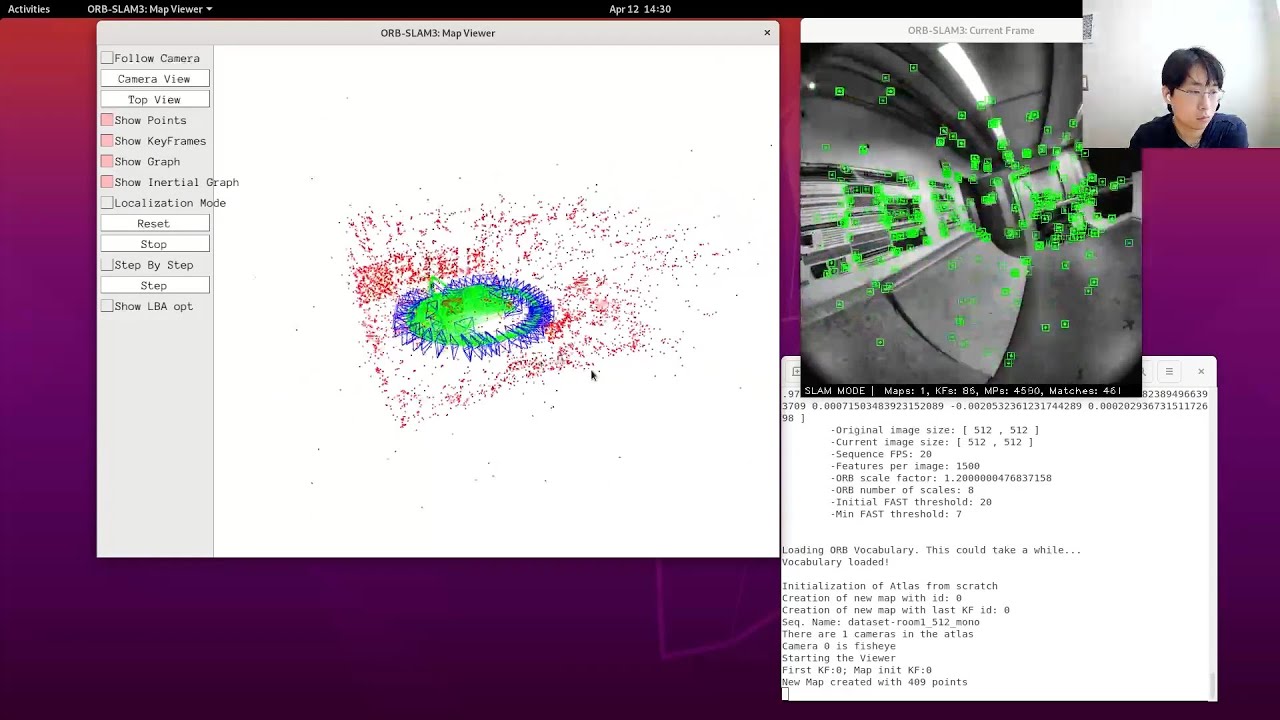
Muchang Bahng| Setup | Installing ORB-SLAM3 on Ubuntu 20.04 ARM64
Автор: Muchang Bahng
Загружено: 2024-04-12
Просмотров: 4863
Chapters:
00:00:00 Set up VM with multipass
00:03:57 Make new user and add to usermod
00:06:19 install build-essentials make cmake
00:06:56 install eigen3
00:07:30 install pangolin v0.8
00:08:08 install ubuntu desktop
00:13:53 install xrdp for remote desktop protocol
00:15:29 test gui with microsoft remote desktop
00:17:49 build pangolin
00:21:08 install libgtk2.0-dev libcanberra-gtk-module
00:21:54 install dependencies for opencv
00:22:14 download opencv opencv-contrib 4.7.0
00:24:24 build opencv and install
00:37:05 install boost
00:40:23 install libssl-dev
00:40:26 check /usr/local/include for libraries
00:40:59 git clone ORB-SLAM3
00:41:30 set vim configurations for faster editing
00:43:44 edit opencv and eigen3 dependency versions in CMakeLists.txt
00:45:22 set bUseViewer to True for mono_euroc.cc
00:45:46 set make to 4 threads in buildfile so building doesn't run out of RAM
00:46:02 build orb slam 3 (error)
00:48:03 change compiler to C++14
00:51:57 build succeeded
00:52:04 download TUM VI room1 dataset
00:59:46 check camera parameter settings in yaml file for TUM VI
01:00:15 Run ORB-SLAM3 without GUI & monitor with htop
01:04:43 succeeded, check frames and keyframes file
01:05:02 try running with camera and map viewer (not working and debugging)
01:18:15 try outputting keypoints detected per frame and rebuild
01:25:33 realize I need to set bUserViewer=True in mono_tum_vi.cc
01:27:40 rerunning successfully with map viewer
Доступные форматы для скачивания:
Скачать видео mp4
-
Информация по загрузке: