Скачать
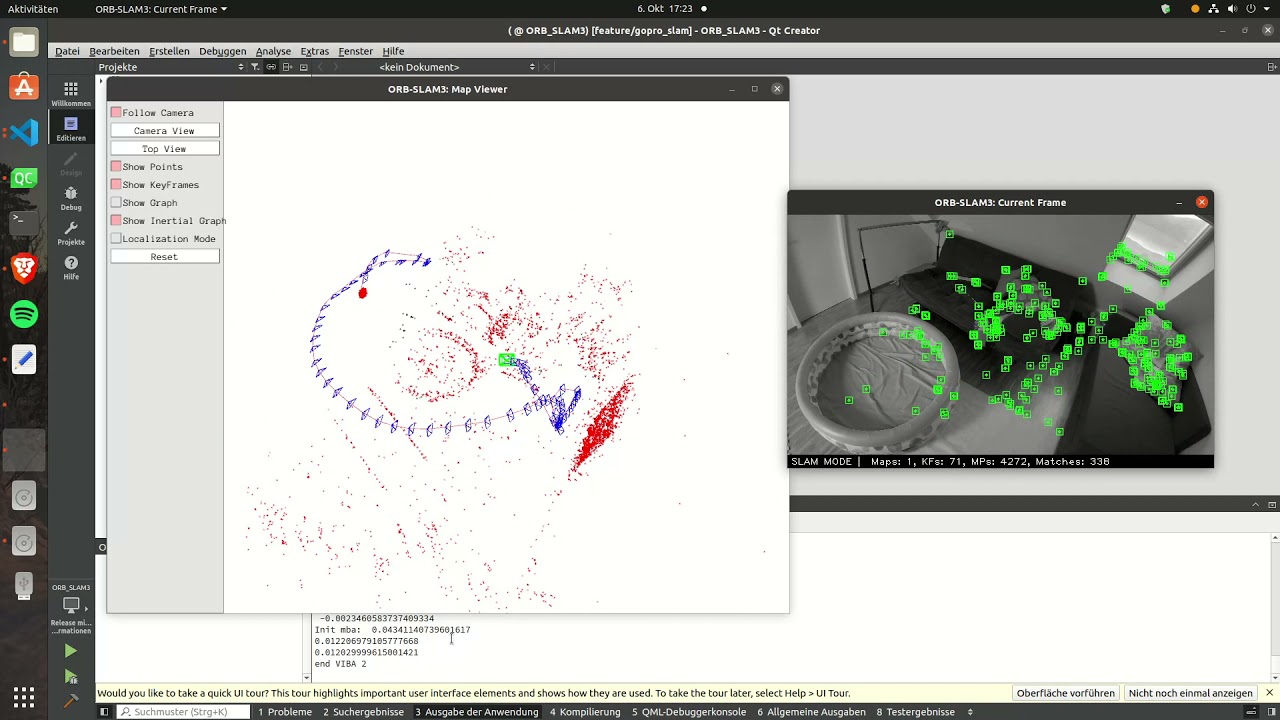
Monocular Visual Inertial ORB-SLAM3 on a GoPro 9 @ 50fps
Автор: Stef87
Загружено: 2021-10-06
Просмотров: 4016
Описание:
Testing Monocular Visual-Inertial ORB-SLAM3 on a GoPro9.
Apart from the first initialization glitch the tracking works perfectly even with very fast motions.
GoPro9 settings:
1920x1080 @ 50 fps
Lens setting: Wide
You can find my fork of ORB-SLAM3 here: https://github.com/urbste/ORB_SLAM3.
The GoPro telemetry data was extracted using https://github.com/JuanIrache/gopro-t....
This code is also part of OpenICC.
The calibration of IMU to camera transformations and IMU noise parameters was done using OpenICC https://github.com/urbste/OpenImuCame....
Доступные форматы для скачивания:
Скачать видео mp4
-
Информация по загрузке: