Скачать
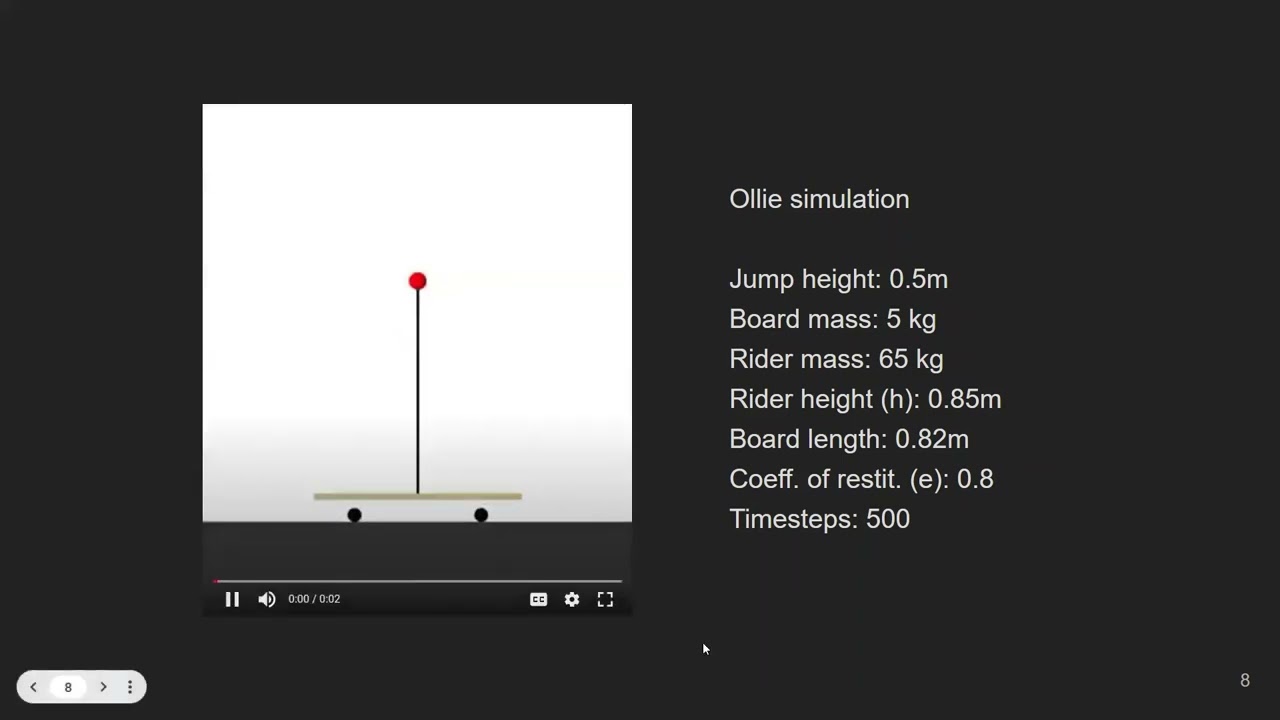
Autonomous Hybrid Trajectory Optimization of Simple Skateboarding Tricks through Contact
Автор: Michael Burgess
Загружено: 2022-05-08
Просмотров: 329
Описание:
MIT 6.832 Final Project (Spring 2022)
See paper here: https://arxiv.org/abs/2310.11599
Code available here: https://deepnote.com/workspace/michae...
by Michael Burgess
Доступные форматы для скачивания:
Скачать видео mp4
-
Информация по загрузке:



















