Non linearity of Rack and pinion servo moving an arm
Автор: Auggie Copter
Загружено: 2024-08-25
Просмотров: 406
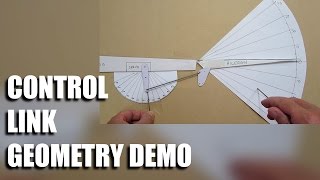
There is a misconception about these drives. A circular drive driving a circular action is linear, in other words, as long as the radius are the same, if the servo rotates a certain amount of degrees, the receiving end rotates the same amount of degrees making it linear in other words one degree rotation produces one degree at any angle. In a linear displacement to circular system as shown, the linear displacement gets exaggerated when the receiving end goes to the extremes making any amount of movement of the driving side no matter how small into a lot of degrees on the driven side therefore making it completely non-linear. This obviously is more complex than this because of the additional collective pitch action. Many years ago I posted a mathematical proof and analysis of it with formulas and explanations on RunRyder for those interested and the myth was put to rest.
It always comes back but math doesn’t change and it’s still true that the mix of both is not linear.
Now and the most important thing to understand is that when using a flight controller, all those things are unimportant because the movements of the servos are determined by the feedback from the sensors like the 3-axis gyro.
If the flight controller senses that the requested helicopter rotation is not achieved yet, it will keep going until it does regardless of the linearity of the driving system. The rate of change is also controlled by the flight controller and constantly compared with the requested one and adjustments to the servo actions are done constantly to make the rate match the requested one.
In other words, flight controllers will make the helicopter rotate and act as requested regardless of the linearity of the servo system. There are certain things that are affected by the linearity like resolution for instance so a well designed linear system has certain advantages.

Доступные форматы для скачивания:
Скачать видео mp4
-
Информация по загрузке: