Скачать
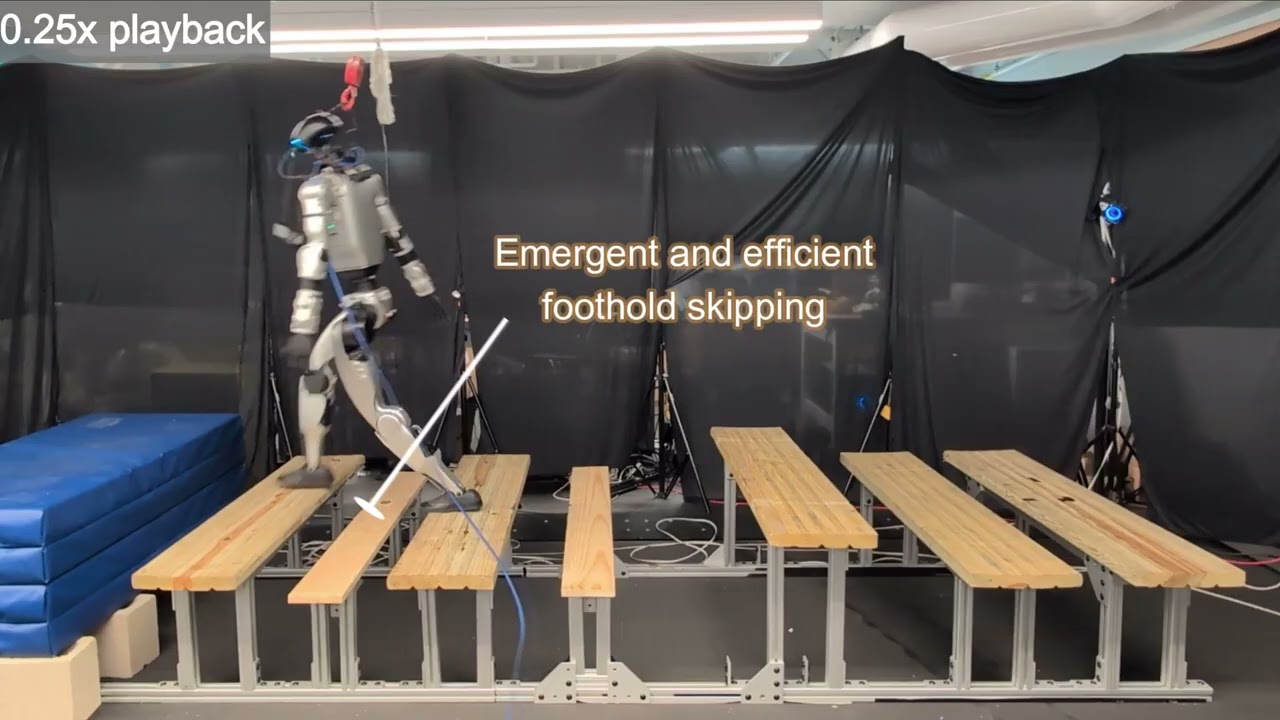
Reinforcement Learning-Based Footstep Control for Humanoid Robots on Complex Terrain
Автор: Suliman
Загружено: 2025-10-22
Просмотров: 601
Описание:
This video presents the results from our IEEE Access paper, where we propose a Reinforcement Learning (RL)-based footstep planning framework for humanoid robots. The method enables stable and adaptive locomotion over complex and uneven terrain without relying on explicit dynamic models.
Read the full paper on IEEE Access: https://ieeexplore.ieee.org/document/11204001
#ReinforcementLearning #HumanoidRobotics #IEEEAccess #LocomotionControl #Robotics #AI #BipedalRobots #RobotControl

Доступные форматы для скачивания:
Скачать видео mp4
-
Информация по загрузке: