CPU LLM #2: The Memory Trick That Makes Multi-Core CPUs Fly for AI
Автор: ANTSHIV ROBOTICS
Загружено: 2025-06-30
Просмотров: 498
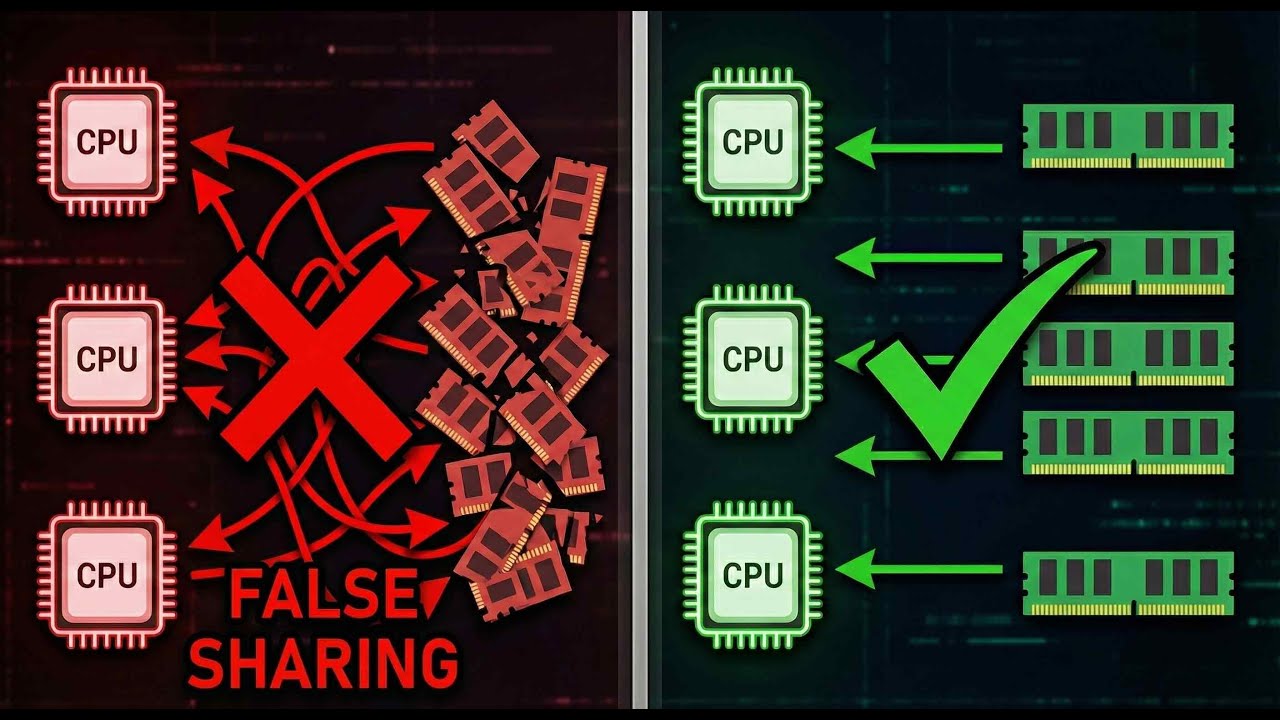
Ever wondered why adding more CPU cores doesn't always make your AI models faster? The problem often lies in a hidden hardware bottleneck called "false sharing." In this deep dive, we uncover the memory layout trick that solves this issue and unlocks true, linear performance scaling for AI on multi-core CPUs.
Building on the brilliant foundation of Andrej Karpathy's llama2.c, we analyze why simple sequential memory allocation, while great for single-threaded performance, hits a wall in parallel processing. I'll break down the complex topic of cache coherency and false sharing step-by-step using detailed infographics.
Then, we'll walk through the complete C code for a "bump" allocator that creates a perfectly cache-aligned, single-block memory layout. You'll see how this low-level optimization strategy minimizes cache misses, eliminates TLB churn with huge pages, and allows our code to achieve near-perfect performance scaling.
In this video, you will learn:
The difference between sequential and cache-aligned memory layouts.
What False Sharing is and why it kills parallel performance.
How to implement a "bump" allocator in C for perfect memory alignment.
How to structure memory for high-performance, multi-core AI workloads.
📦 Source Code (Release v0.1.0)
→ https://github.com/antshiv/C-Transfor...
🔎 Browse the code at this version:
→ https://github.com/antshiv/C-Transfor...
💻 Clone and checkout:
git clone https://github.com/antshiv/C-Transfor...
cd C-Transformer
git checkout v0.1.0
🧠 Read the release notes for architecture details.
Karapathy's GPT-2 C code: https://github.com/karpathy/llm.c/blo...
You can join our discord channel here:
/ discord
** Open Source Repositories in github **
The github repository to access the Drone code:
► https://github.com/antshiv/BLEDroneCo...
The handheld controller code:
]
► https://github.com/antshiv/BLEHandhel...
The github repository to access the thrust stand files:
► https://github.com/antshiv/ThrustStand
*** MCU Development Environment:
► NXP Microcontrollers- McuXpresso
► Microchip Microcontrollers including Arduino- Microchip Studio
► Linux + VI + ARM GCC
Linux Environment:
► VirtualBox + Linux Mint
► Window Manager - Awesome WM
Electronic Tools I use:
► Oscilloscope Siglent SDS1104X-E - https://amzn.to/3nRcziY
► Power source - Yihua YH-605D
► Preheater Hotplate - Youyue946c - https://amzn.to/356DhgS
► Soldering Station - Yihua 937D - https://amzn.to/33VXm9b
► Hot Air gun - Sparkfun 303d
► Logic Analyzer - Salae - https://amzn.to/3AoQ4qy
► Third hand - PCBite Kit - https://amzn.to/3JCYZbr
► Solder fume Extractor - https://amzn.to/3H2a0kE
► Microscope - https://amzn.to/3vQXz9d
Software Tools I use:
► PCB Design - Altium
► Mechanical Part modelling - Solidworks
► 3d Modelling and design prototyping - 3ds Max
► Rendering Engine - VRay
► Mathematical Modelling and model based design - MATLAB and Simulink
Links:
► Website: https://www.antshiv.com
► Blog: https://shivasnotes.com
► Patreon page: / antshiv_robotics
DISCLAIMERS:
We are a participant in the Amazon Services LLC Associates Program, an affiliate advertising program designed to provide a means for us to earn fees by linking to Amazon.com and affiliated sites.
This video was not paid for by outside persons or manufacturers.
No gear was supplied to me for this video.
The content of this video and my opinions were not reviewed or paid for by any outside persons.
Доступные форматы для скачивания:
Скачать видео mp4
-
Информация по загрузке:





![Вы неверно понимаете теорию эволюции [Veritasium]](https://imager.clipsaver.ru/Unxh6MnVIWc/max.jpg)







![Как сжимаются изображения? [46 МБ ↘↘ 4,07 МБ] JPEG в деталях](https://imager.clipsaver.ru/Kv1Hiv3ox8I/max.jpg)