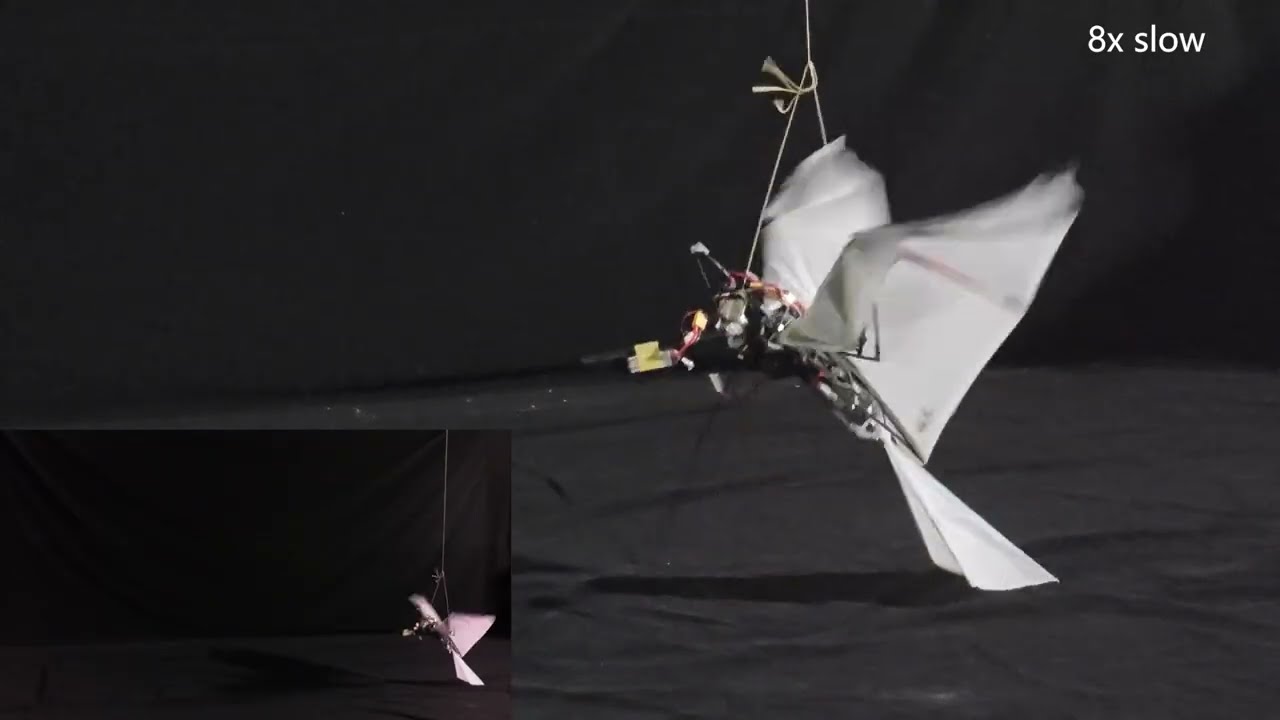
Flapping-wing robot achieves bird-style self-takeoff
Автор: Necrobioarchetype
Загружено: 2025-10-31
Просмотров: 103331
Abstract
Flying vertebrates use specialized wingbeat kinematics in hovering, takeoff, and landing, featuring ventrally anterior downstrokes and aerodynamically inactive upstrokes to enhance aerodynamic characteristics at low airspeeds. Rarely implemented in robotics, this inspired RoboFalcon2.0, a flapping-wing robot with reconfigurable mechanisms performing bioinspired flap-sweep-fold (FSF) motion for controlled bird-style takeoff. FSF couples flapping, sweeping, and folding within a single wingbeat cycle, mimicking vertebrate slow-flight kinematics. Wind tunnel tests demonstrate that sweeping amplitude modulates lift and pitching moment in FSF motion. Computational fluid dynamics simulations reveal that FSF’s aerodynamic effects correlate with leading-edge vortex strength and pressure center location. Dynamics simulations analyze pitch control during takeoff. Real-world flights validate RoboFalcon2.0’s self-takeoff capability. This work advances avian-inspired robotics through vertebrate-like actuation principles, enabling more biomimetic flapping-wing designs.
Ang Chen, Bifeng Song, Kang Liu, Zhihe Wang, Dong Xue, and Hongduo Qi. Science Advances. 3 Sep 2025, Vol 11, Issue 36. DOI: 10.1126/sciadv.adx0465
Доступные форматы для скачивания:
Скачать видео mp4
-
Информация по загрузке: