Скачать
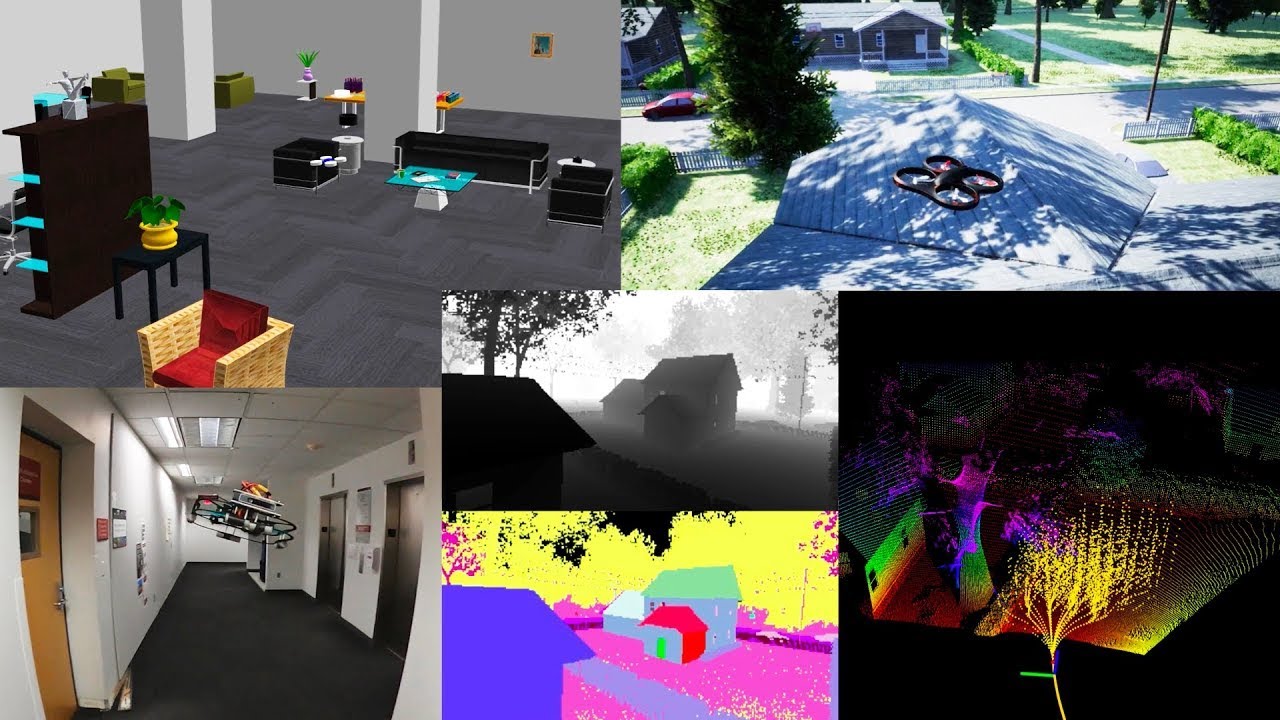
Open-source: Aerial Navigation Development Environment
Автор: Ji Zhang
Загружено: 2022-05-06
Просмотров: 2294
Описание:
The environment is meant for leveraging system development and robot deployment for autonomous aerial navigation. Supporting Gazebo and AirSim simulators and containing autonomous navigation modules such as collision avoidance, waypoint following, and manual flight, users can develop autonomous navigation systems and later on port those systems onto real flying robots for deployment.
Open-source repository:
https://github.com/caochao39/aerial_n...
Доступные форматы для скачивания:
Скачать видео mp4
-
Информация по загрузке: