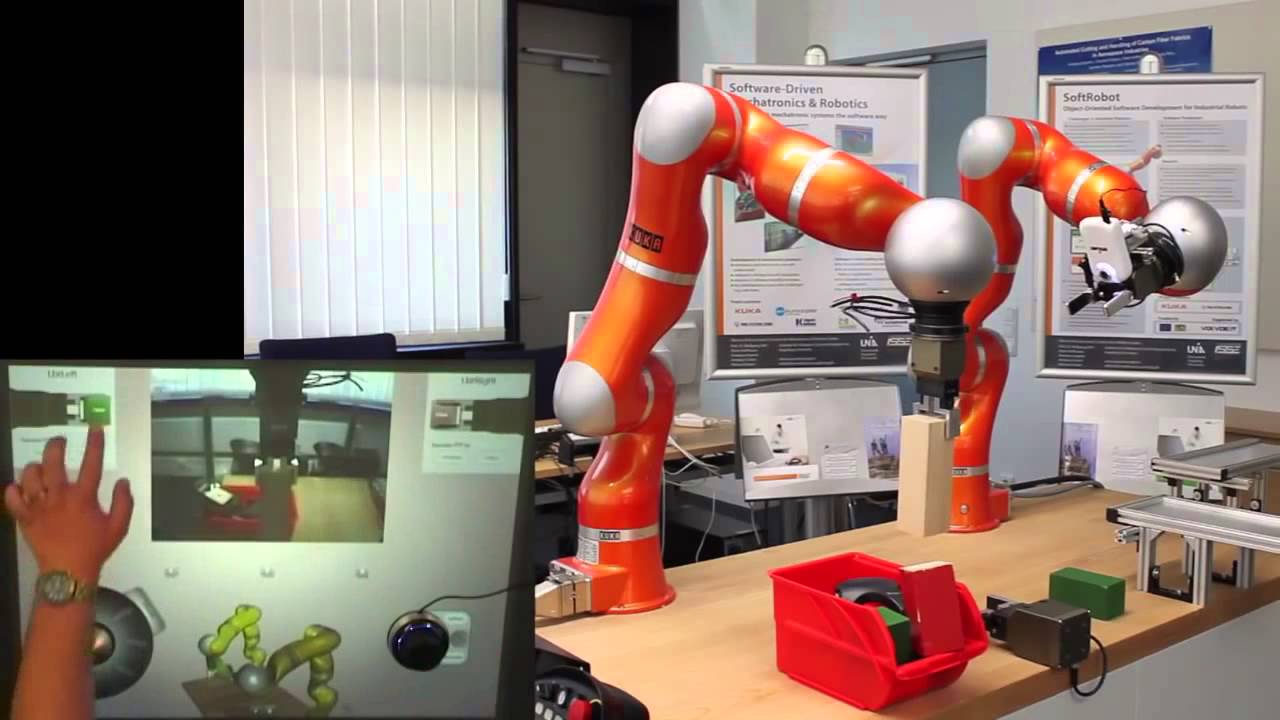
Tele-operation using two KUKA Lightweight Robots and MS Surface
Автор: Lakeshia Stockton
Загружено: 2014-09-18
Просмотров: 66
Watch video in HD for best experience!
Two KUKA Lightweight Robots are remote controlled (tele-operated) by a Microsoft surface application utilizing mult-touch and tangible interaction. The operator cannot see the robots directly, he can just use three types of feedback that are provided: the picture taken by a camera mounted on the right robot, a 3D visualization of the robot poses and the force values measured by the robots at their end effectors. These force values are displayed inside the 3D visualization.
The application is powered by a robot control architecture developed in the research project SoftRobot. The architecture includes a real-time robot control core supporting the Realtime Primitives Interface (RPI) and the Java-based Robotics API for high level robot application modeling.
There is a paper about this work, entitled "Two-arm Robot Teleoperation using a Multi-touch Tangible User Interface". It is available at the ScitePress Digital Library:
/
Доступные форматы для скачивания:
Скачать видео mp4
-
Информация по загрузке:





![Как сжимаются изображения? [46 МБ ↘↘ 4,07 МБ] JPEG в деталях](https://image.4k-video.ru/id-video/Kv1Hiv3ox8I)