Скачать
근전도센서를 이용한 ROS기반의 산업용 로봇 원격제어
Автор: IRaC Lab
Загружено: 12 мар. 2020 г.
Просмотров: 1 140 просмотров
Описание:
근전도센서를 이용한 ROS기반의 산업용 로봇 원격제어
(Teleoperation Control of ROS-based Industrial Robot using EMG signals)
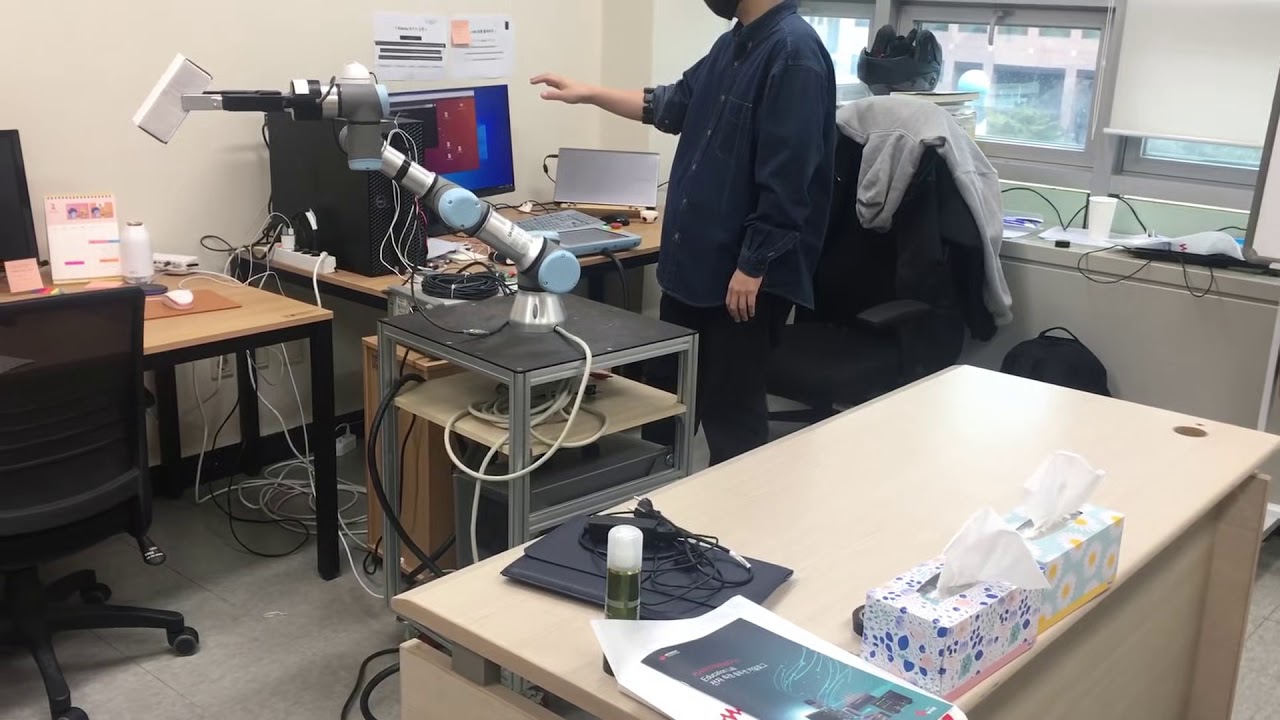
설명 : PC를 이용하여 Ubuntu 환경에 ROS를 이용한다. 6자유도를 가진 로봇암을 팔 장착용 근전도 센서를 이용하여 원격으로 제어한다. 로봇 암과 PC는 유선으로 연결되어 있고, 근전도 센서는 블루투스 어댑터를 이용하여 PC와 무선으로 연결 되어 있다. ROS통신을 이용하여 근전도 센서가 인식한 팔의 움직임에 대한 데이터를 로봇암에 전달한다.
*로봇 암은 사람이 움직이는 방향과 같은 방향으로 움직이고 로봇 암에 장착된 그리퍼는 사람의 손 제스처에 의해서 작동하게 된다.
개발 환경 및 사용 장비
로봇 암 : UR3 (Universal Robots)
그리퍼 : 2F - 140 Gripper (Robotiq)
OS : Linux Ubuntu 16.04 (VirtualBox)
ROS : ROS Kinetic Kame
근전도 센서 : Myo armband (Thalmic Labs)
Доступные форматы для скачивания:
Скачать видео mp4
-
Информация по загрузке:


![1. [sEMG] The introduction of Surface EMG(표면근전도의 이해)](https://ricktube.ru/thumbnail/sgyo9y3KtXI/mqdefault.jpg)






