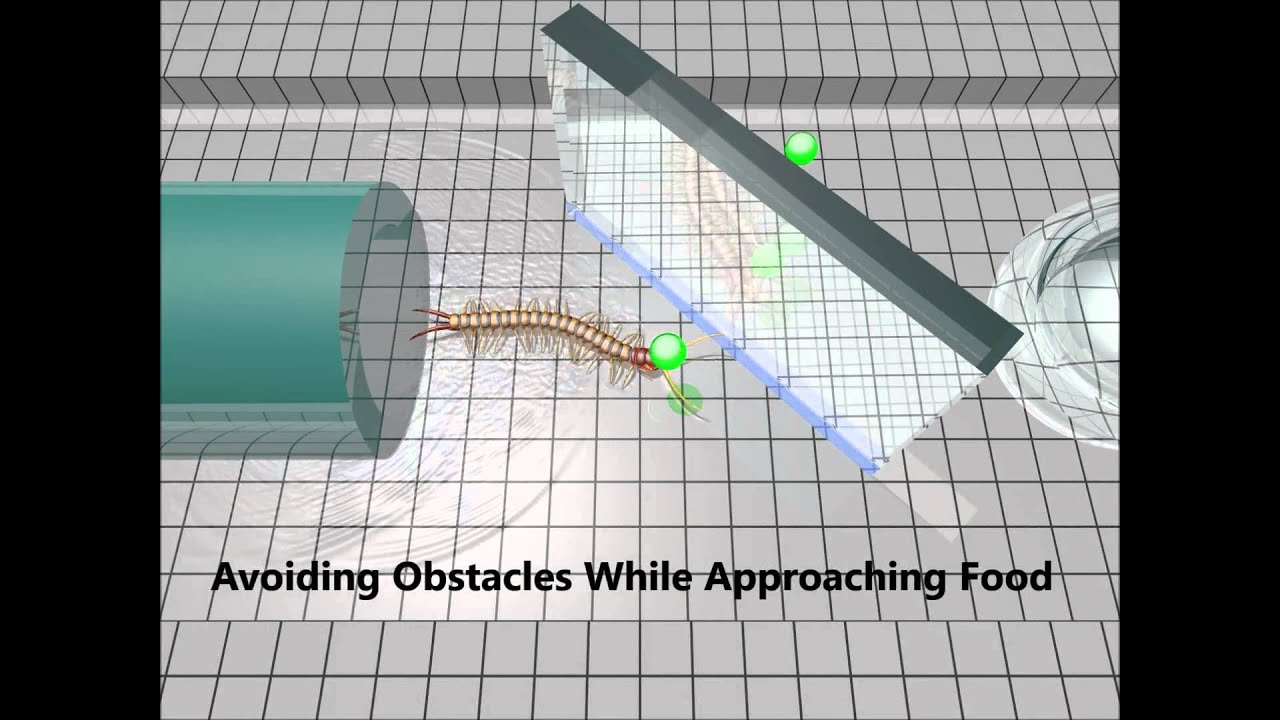
Modeling and animating myriapoda: a real-time kinematic/dynamic approach
Автор: Chenfanfu Jiang
Загружено: 2013-08-03
Просмотров: 1643
Jingyi Fang, Chenfanfu Jiang, and Demetri Terzopoulos. 2013. Modeling and animating myriapoda: a real-time kinematic/dynamic approach. In Proceedings of the 12th ACM SIGGRAPH/Eurographics Symposium on Computer Animation (SCA '13). ACM, New York, NY, USA, 203-212.
Unlike two, four, six, and eight legged animals, Myriapoda---i.e., centipedes, millipedes, etc.---have been largely overlooked in the computer graphics literature. We present an artificial life framework for modeling these arthropods and animating their locomotive behavior over regular or irregular surfaces in real time with compelling physical and biological realism. Our hybrid approach combines kinematic and dynamic simulation, as well as a decentralized, distributed leg control system whose emergent behavior is suitable for animating simulated myriapoda of different morphologies with the characteristically vivid leg wave patterns of their biological counterparts. The simulated creature's antennae sense its virtual environment and the sensory information guides its adaptive behaviors, including obstacle avoidance and foraging.
Доступные форматы для скачивания:
Скачать видео mp4
-
Информация по загрузке:
![[SIGGRAPH 2017] Anisotropic Elastoplasticity for Cloth, Knit and Hair Frictional Contact](https://imager.clipsaver.ru/eGtB0VXJsuI/max.jpg)