Category-level Neural Field for Reconstruction of Partially Observed Objects in Indoor Environment
Автор: LARR SNU
Загружено: 2024-06-06
Просмотров: 640
Status: Accepted for publication in IEEE Robotics and Automation Letters (RA-L)
Category: Category-level Neural Field for Reconstruction of Partially Observed Objects in Indoor Environment
Author: Taekbeom Lee, Youngseok Jang, H. Jin Kim
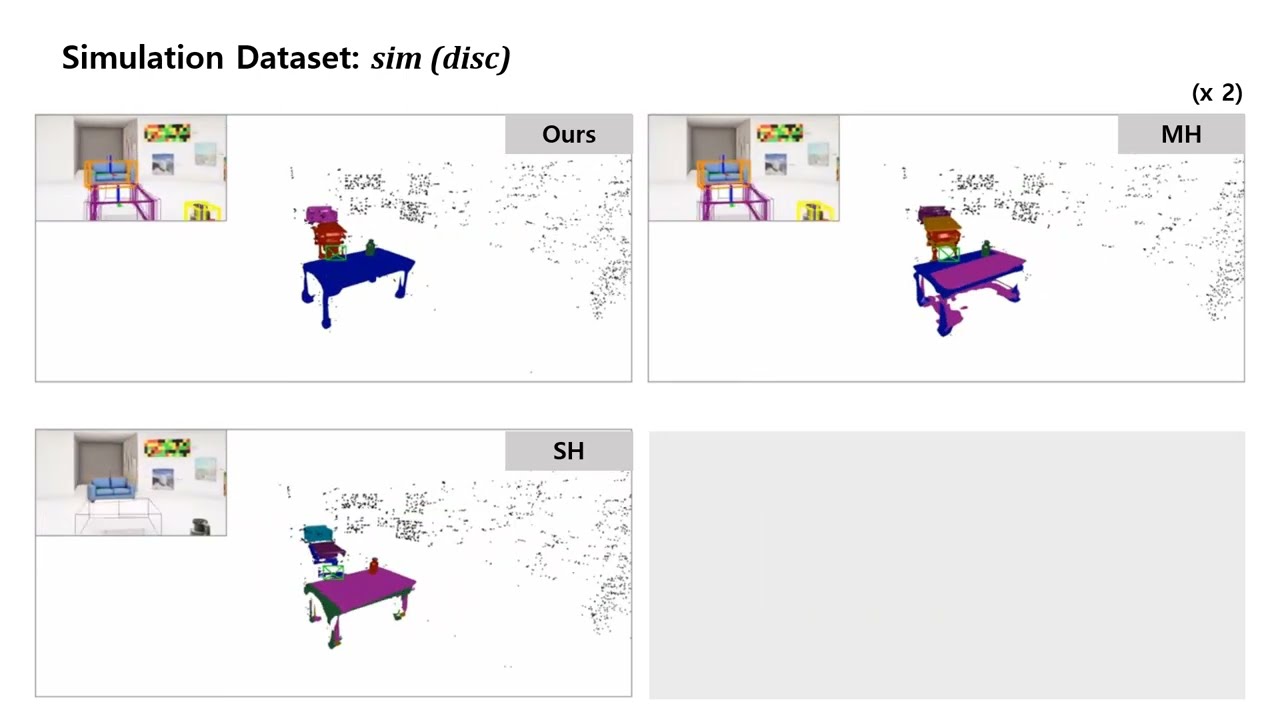
Abstract: Neural implicit representation has attracted attention in 3D reconstruction through various success cases. For further applications such as scene understanding or editing, several works have shown progress towards object-compositional reconstruction. Despite their superior performance in observed regions, their performance is still limited in reconstructing objects that are partially observed. To better treat this problem, we introduce category-level neural fields that learn meaningful common 3D information among objects belonging to the same category present in the scene. Our key idea is to subcategorize objects based on their observed shape for better training of the category-level model. Then we take advantage of the neural field to conduct the challenging task of registering partially observed objects by selecting and aligning against representative objects selected by ray-based uncertainty. Experiments on both simulation and real-world datasets demonstrate that our method improves the reconstruction of unobserved parts for several categories.
Contact: ltb1128@snu.ac.kr

Доступные форматы для скачивания:
Скачать видео mp4
-
Информация по загрузке:

![[RA-L] Hierarchical Active Exploration of Radiance Field with Epistemic Uncertainty Minimization](https://imager.clipsaver.ru/FkY7t2IeWhE/max.jpg)








![Как сжимаются изображения? [46 МБ ↘↘ 4,07 МБ] JPEG в деталях](https://imager.clipsaver.ru/Kv1Hiv3ox8I/max.jpg)




