Robotic Arm Simulator – Forward & Inverse Kinematics | Python, PyQt & Matplotlib
Автор: Tobias Sjöblom
Загружено: 2025-12-16
Просмотров: 4
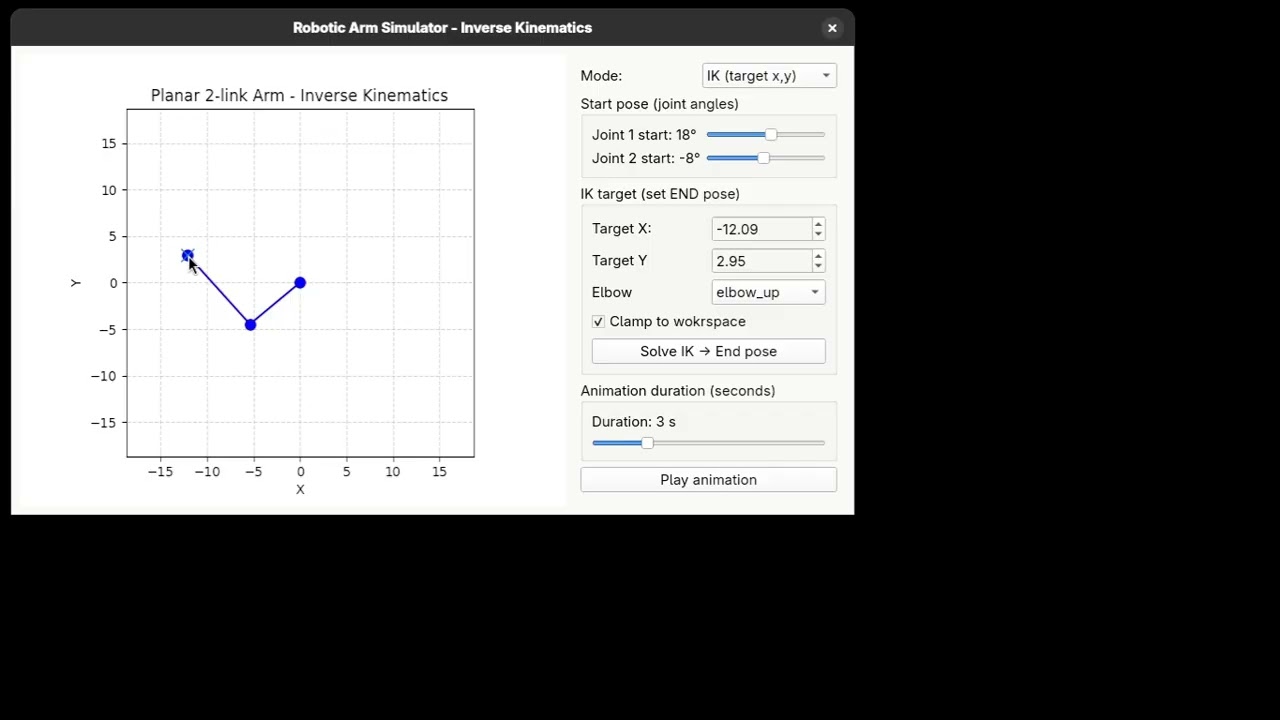
This video demonstrates an interactive 2D robotic arm simulator developed in Python as a final project for CS50.
The simulator supports both forward kinematics (FK) and inverse kinematics (IK), joint-space motion planning, and smooth animated trajectories. A PyQt-based graphical interface with an embedded Matplotlib plot allows real-time visualization, slider-based joint control, and mouse-click inverse kinematics target selection.
Key features:
• Forward kinematics visualization and animation
• Closed-form inverse kinematics for a 2-link planar arm
• Click-to-set IK targets with elbow-up / elbow-down configurations
• Joint-space interpolation with configurable easing
• PyQt + Matplotlib interactive GUI
• Command-line interface and scenario-based demos
This project was designed as an educational robotics and engineering tool, emphasizing clean architecture, reusable kinematics logic, and intuitive user interaction.
🔗 GitHub repository:
https://github.com/sjoblomtech/robotic_arm...
🌐 Portfolio:
https://www.sjoblomtech.com
💼 LinkedIn:
https://www.linkedin.com/in/tobias-sjoblom/
robotics, robot arm, inverse kinematics, forward kinematics, motion planning, python, pyqt, matplotlib, simulation, cs50
Доступные форматы для скачивания:
Скачать видео mp4
-
Информация по загрузке:




![Мы получили 2,5 млн рублей чтобы сделать экзоскелет, и это наконец закончилось [2/2]](https://image.4k-video.ru/id-video/X3uZq2joiW8)














