Скачать
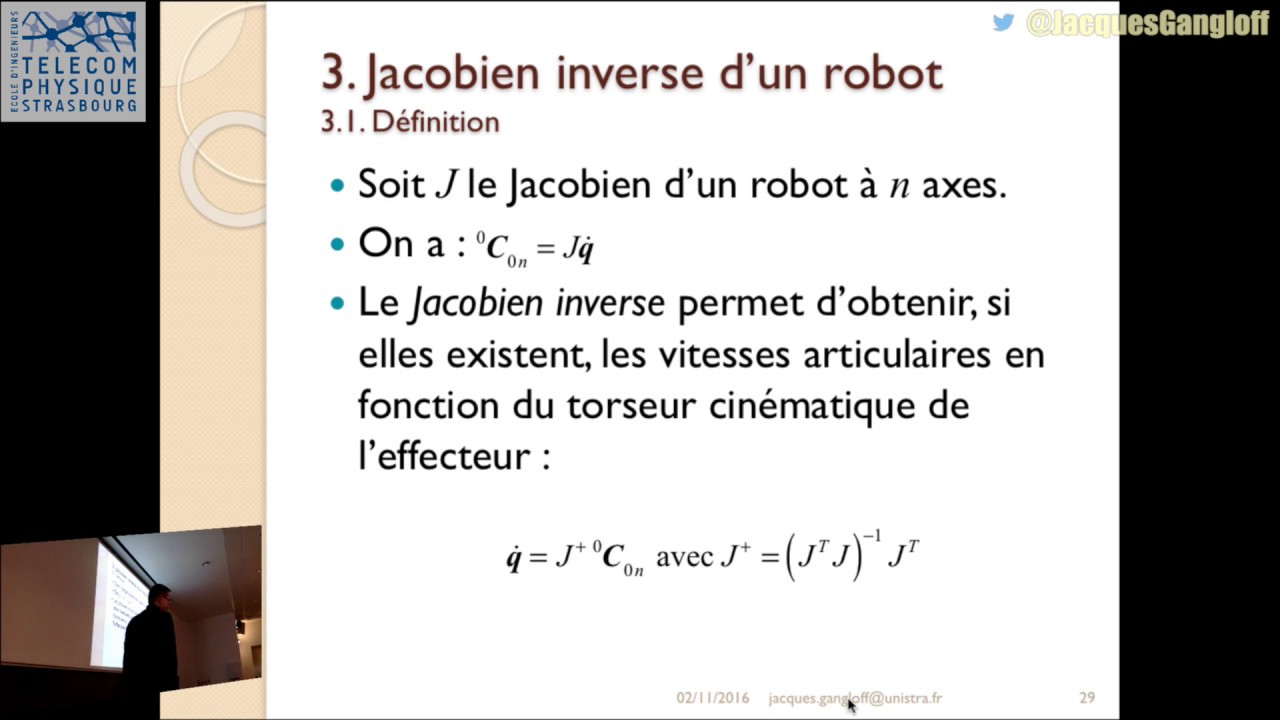
Cours de Robotique : séance 6 sur 9
Автор: Jacques Gangloff
Загружено: 2016-11-02
Просмотров: 10531
Описание:
Fin de la modélisation cinématique, début de la modélisation dynamique.
Cours de robotique de manipulation de Télécom Physique Strasbourg / master IRIV
Niveau : bac+5
Matériel pédagogique sur https://www.rbotx.org menu "Programme"
Доступные форматы для скачивания:
Скачать видео mp4
-
Информация по загрузке: