Exwayz x Cepton - Map based object detection with Cepton Nova LiDAR
Автор: Exwayz
Загружено: 2022-11-17
Просмотров: 902
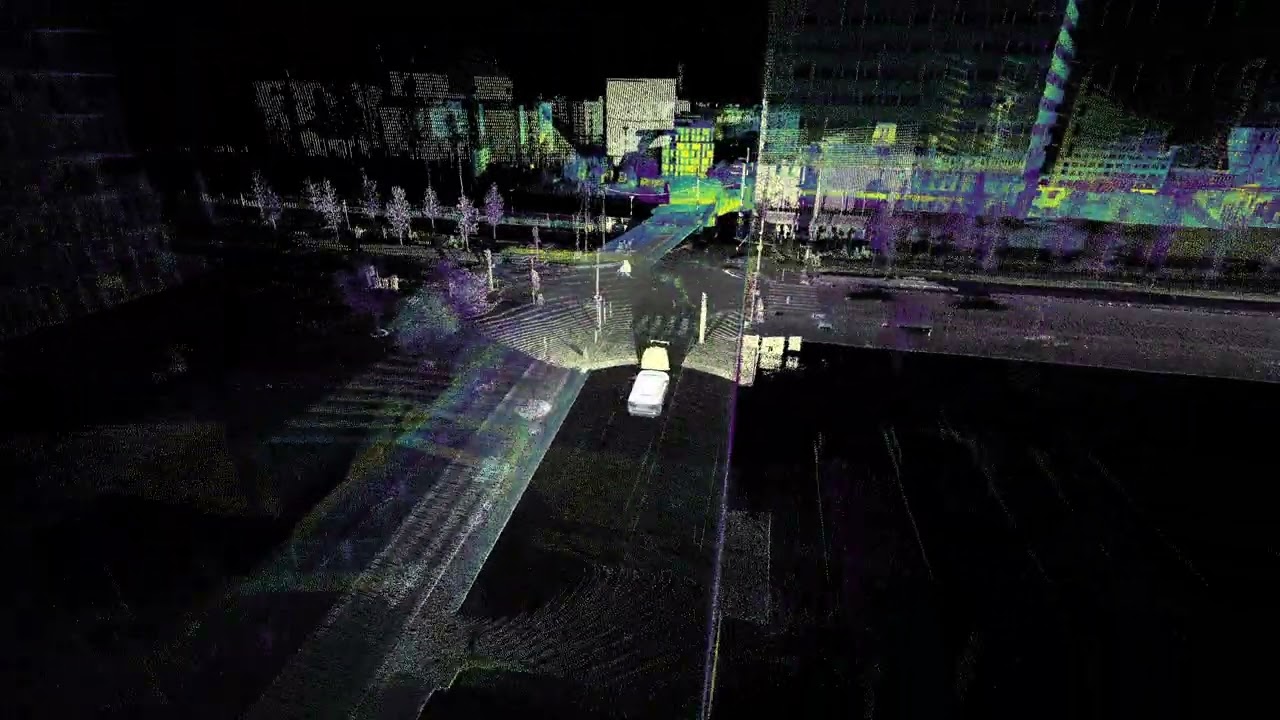
Exwayz is partner with Cepton! On this video, we demonstrate a robotic use case with Cepton's Nova sensor, built for short range detection.
The algorithm performed here is called RODAT : it uses a reference map (3D dense point cloud) for both localizing the sensor in real-time (that's why the current LiDAR frame and the background map perfectly overlap) and detection obstacle, e.g. objects that are not in this map. It allows to detect obstacles without any priror knowledge of the kind of obstacle it could be!
On top of the obstacle detection, a classification step is performed for distinguishing humanoid obstacle (in red) from other type of obstacles (in blue).
This software is the perfect gear for helping an autonomous robot to navigate 😉 It only requires a LiDAR sensors and a licence for Exwayz SDK.
Wanna try? 👉 www.exwayz.fr

Доступные форматы для скачивания:
Скачать видео mp4
-
Информация по загрузке: