Reinforcement learning transition control of a double inverted pendulum
Автор: Embedded Control Lab.
Загружено: 2023-10-21
Просмотров: 2450
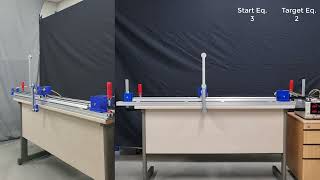
This video shows the experimental results of the transition control of a double inverted pendulum. The control law was developed using a Sim-to-Real reinforcement learning approach. It demonstrates exceptional recovery performance, a feature lacking in classical transition control methods. Control was implemented using LW-RCP02 (Light-weight Rapid Control Prototyping 02), which was developed by Embedded Control Lab, and Simulink. The sampling time is 1 ms.
The double inverted pendulum and LW-RCP02 can be purchased from Sungjin Techwin. For purchase inquiries, please contact [email protected].
Academic paper : Taegun Lee, Doyoon Ju, and Young Sam Lee, Transition control of a double inverted pendulum system using Sim2Real reinforcement learning, Machines, vol. 13, no. 3, 2025. https://doi.org/10.3390/machines13030186
이 영상은 2단 도립진자의 천이제어(transition control)에 대한 실험결과를 보여준다. 제어법칙은 Sim-to-real 방식의 강화학습을 이용하여 개발되었다. 영상에서 볼 수 있듯이 매우 뛰어난 recovery 성능을 가지고 있는데 이에 비해 전통적인 천이제어 기법들은 recovery 성능을 가지고 있지 못하다. 제어기는 Embedded Control Lab에서 개발한 LW-RCP02 (Light-weight Rapid Control Prototyping 02)와 Simulink를 이용하여 구현하였다. Sampling time은 1 ms이다.
2단도립진자와 LW-RCP02는 성진테크윈으로부터 구입할 수 있습니다. 구매문의는 [email protected]로 해주세요.

Доступные форматы для скачивания:
Скачать видео mp4
-
Информация по загрузке:













![☀ ПРОПЕЛЛЕРЫ РАЗРЫВАЮТСЯ в воздухе! Тест новинки пошёл не по плану... [Huma20]](https://ricktube.ru/thumbnail/aIX-cu4Ag1A/mqdefault.jpg)




