Ajuste empírico PIDs: control proporcional sistema 1er orden estable, prueba y error, intuitivo
Автор: Modelado, Identificación, Control (A. Sala)
Загружено: 15 апр. 2025 г.
Просмотров: 37 просмотров
Este vídeo discute el control proporcional en un sistema de primer orden y su relación con control todo-nada. El proceso en concreto será G(s)=2.5/(2s+1). Se abordará todo de forma "intuitiva", "heurística", sin excesiva teoría subyacente.
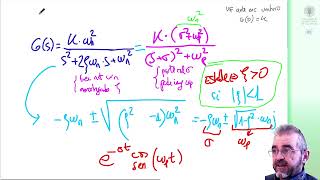
Primero, recuerda lo que es el comportamiento de un sistema de 1er orden estable (transitorio exponencial entre dos puntos de equilibrio, efecto instantáneo entre variable manipulada y velocidad de la salida)... nivel, presión, concentración son, en primera aproximación, ejemplos de esta dinámica.
Luego, recuerda el diagrama de bloques de un bucle cerrado usual, pero en la sintonía por prueba y error (nuestro objetivo aquí) no son necesarias las ecuaciones de bucle cerrado. En el bucle que se simulará se añade ruido de medida, saturación y perturbaciones a la entrada (ruido de proceso), y se representan en dicho diagrama de bloques.
A continuación, presenta la estructura de una aplicación de simulación de controladores que será utilizada en este vídeo y en sucesivos.
Se comienza probando reguladores proporcionales de ganancia creciente. Se observa que existe un error residual (error de posición) en régimen permanente que decrece conforme crece la ganancia; los transitorios son asimismo cada vez más rápidos.
La simulación presenta la limitación de rapidez causada por la saturación del actuador y la amplificación de ruido de medida. Discute que cuando la ganancia es muy alta, converge a una especie de control `todo-nada'. Se discute la relación entre control proporcional y ON-OFF (o bi-nivel en caso genérico).
La parte final del vídeo [14:00] discute la corrección del error ante cambios de referencia mediante un cálculo correcto del `punto de operación de la entrada' (denominado `manipulated offset' en alguna documentación de controladores). Esto también se denomina control proporcional con `dos grados de libertad'... Pero NO sirve para cancelar el efecto de error debido a perturbaciones externas no medibles, porque si la referencia no se incrementa, no se puede hacer ningún cálculo o corrección. Para cancelar el error ante perturbaciones no medibles es necesario usar acción integral, pero eso no es objetivo de este vídeo.
____________
Más Información, enlaces y PDF/código en https://personales.upv.es/asala/YT/V/...
#controlpid #matlab #sistemasdecontrol
____________
Suscríbete si te interesa modelado y control de procesos en ingeniería. ¡Gracias!,
Antonio Sala
Universitat Politècnica de València (UPV)
Colección completa en: https://personales.upv.es/asala/YT/
Videos in English: @ASalaControlEN

Доступные форматы для скачивания:
Скачать видео mp4
-
Информация по загрузке: