Как сделать ROS робота
d08ab546-447b-40f1-8a3d-36d7b28fc950

Доклад на тему железа и контрола робота Грин Центра робототехники Сбера

Роль антропоморфных роботов в развитии физического ИИ

Робот Грин от Сбера танцует с Мигелем и Ксенией Михеевой на сцене AI JOURNEY 2025

Презентация антропоморфного робота Грина от Сбера на конференции AIJ

История ROS, ее текущий потенциал и взаимодействие между промышленностью и академическими кругами

Кружок по шагающим роботам для студентов и взрослых

ROS курс, лекция 15, Проведение соревнования Autorace

ROS курс, лекция 14, Docker

ROS курс, лекция 13, Разбор вопросов по соревнованию AutoRace.

ROS курс, Лекция 12, Поведение роботов

ROS курс, лекция 11, Машинное зрение в робототехнике

ROS курс, лекция 10, Манипулятор и захват объектов с программой MoveIt

ROS курс, Лекция 9, Навигация и планирование пути робота

ROS курс, Лекция 7, Соревнование AutoRace

ROS курс, Лекция 6, Симуляция сенсоров в Gazebo

ROS курс, Лекция 5, Создание модели робота для визуализации и симуляции
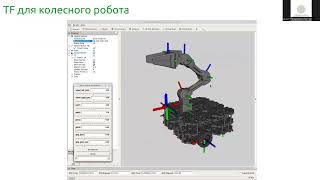
ROS курс, Лекция 4, Преобразование координат в роботе TF2
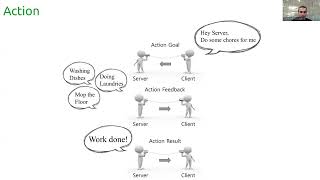
ROS курс, Лекция 3, Продвинутые способы коммуникации: Service, Action

ROS курс, Лекция 2, Простой способ коммуникации topic

ROS курс, Лекция 1, Введение в робототехнику и ROS

Красные ведроиды соревнование AutoRace ROS Gazebo робототехника

Морячки соревнование AutoRace ROS Gazebo робототехника

Zamok Mamok соревнование AutoRace ROS Gazeb робототехника

19-й район соревнование AutoRace ROS Gazebo робототехника

KA-CHOW соревнование AutoRace ROS Gazebo