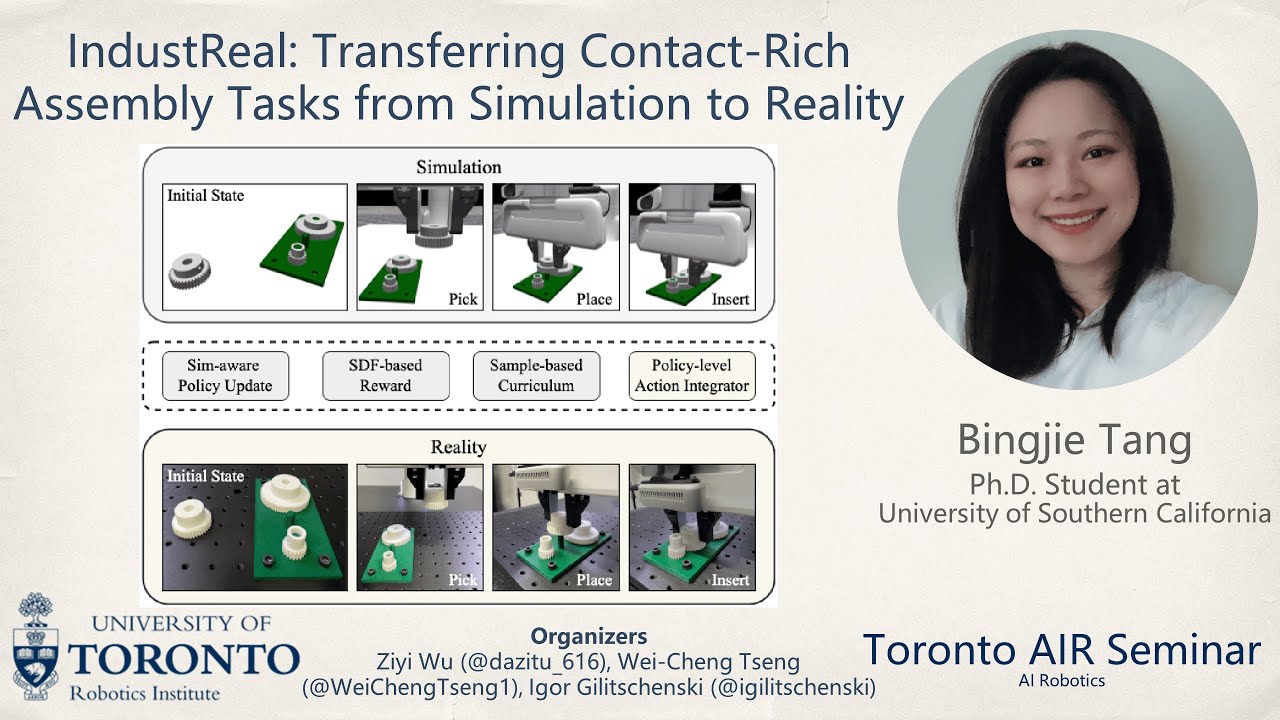
Bingjie Tang on Transferring Contact-Rich Assembly from Simulation to Reality | Toronto AIR Seminar
Автор: AI Robotics Seminar - University of Toronto
Загружено: 2023-05-11
Просмотров: 557
Abstract:
Robotic assembly is a longstanding challenge, requiring contact-rich interaction and high precision and accuracy. Many applications also require adaptivity to diverse parts, poses, and environments, as well as low cycle times. In other areas of robotics, simulation is a powerful tool to develop algorithms, generate datasets, and train agents. However, simulation has had a more limited impact on assembly. We present IndustReal, a set of algorithms, systems, and tools that solve assembly tasks in simulation with reinforcement learning (RL) and successfully achieve policy transfer to the real world. Specifically, we propose 1) simulation-aware policy updates, 2) signed-distance field rewards, and 3) sampling-based curricula for robotic RL agents. We use these algorithms to enable robots to solve contact-rich pick, place, and insertion tasks in simulation. We then propose 4) a policy-level action integrator to minimize error at policy deployment time. We build and demonstrate a real-world robotic assembly system that uses the trained policies and action integrator to achieve repeatable performance in the real world. Finally, we present hardware and software tools that allow other researchers to fully reproduce our system and results.
Paper:
Tang, Bingjie, et al. "IndustReal: Transferring Contact-Rich Assembly Tasks from Simulation to Reality." RSS 2023. https://bingjietang718.github.io/pdfs...
Bio:
Bingjie is a 3rd year PhD student at University of Southern California, working with Prof. Gaurav Sukhatme. Her research interests include reinforcement learning-based robot manipulation, task and motion planning and multi-modality perception for robots. Before joining USC, she received an MS degree in Computer Science from Brown University, where she was closely working with Prof. George Konidaris and Prof. Stefanie Tellex. She received a bachelor degree in CS from Huazhong University of Science and Technology.
Toronto AIR Seminar:
The Toronto AI Robotics Seminar Series is a set of events featuring young robotics and AI experts. The talks are given by local as well as global speakers and organized by the Faculty and Students at University of Toronto’s Department of Computer Science. We welcome students, researchers and robotics enthusiasts from around the world to join us and interact with the Toronto Robotics Community.
Find out more at: https://robotics.cs.toronto.edu/toron...
Доступные форматы для скачивания:
Скачать видео mp4
-
Информация по загрузке: