Open-Source Web Lab for *Remote* and On-site Robotics in a Zero-Setup ROS 2 Development Environment
Автор: UniTartu IMS Robotics
Загружено: 2025-11-11
Просмотров: 97
Supplemental video to a research paper published in IEEE Robotics and Automation Practice.
Krūmiņš, Dāvis, Veiko Vunder, Heiki Kasemägi, Alvo Aabloo, and Karl Kruusamäe. "Open-Source Web Lab for Remote and On-site Robotics Practice in a Realistic Zero-Setup ROS2 Development Environment." IEEE Robotics and Automation Practice, doi: 10.1109/RAP.2025.3629341
Paper: https://doi.org/10.1109/RAP.2025.3629341
Source code: https://github.com/unitartu-remrob/re...
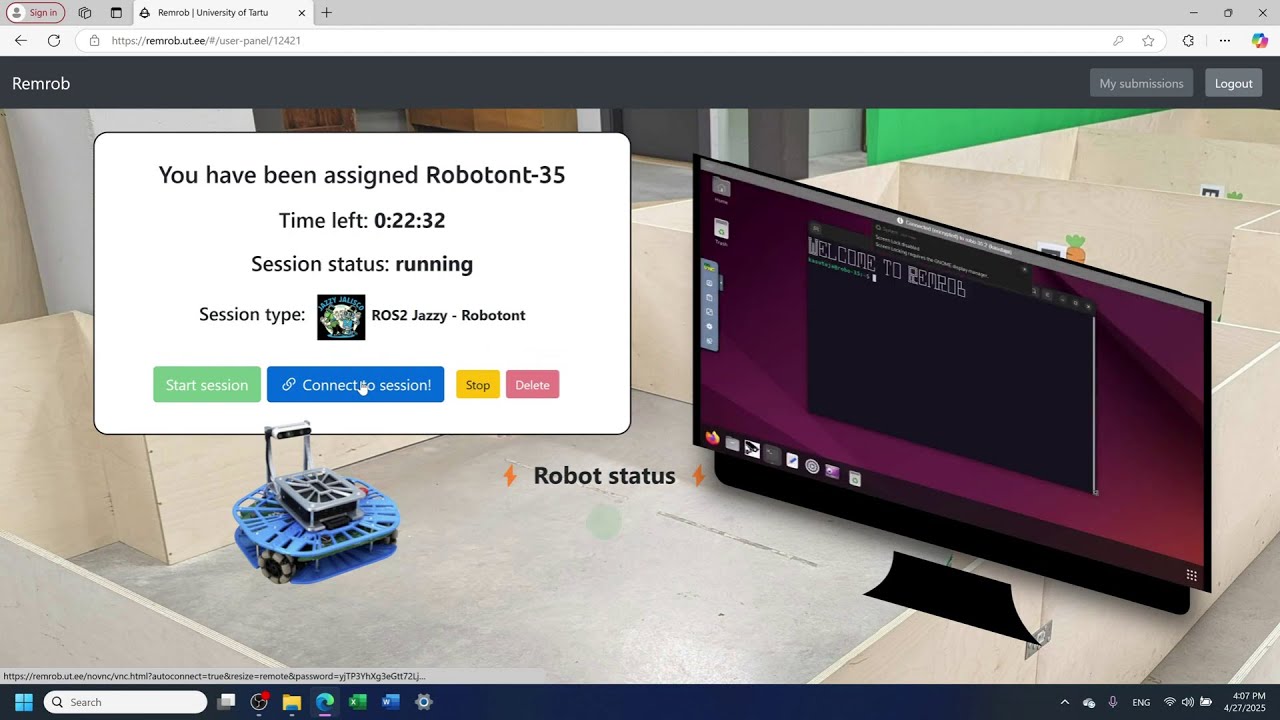
This supplementary video gives an overview of the capabilities of the proposed remote web lab. It consists of three parts, first the user flow as seen in Figure 1 is shown, where by logging into the system through the website https://remrob.ut.ee the user is able to teleoperate a remote Robotont robot by running a ROS2 node. Secondly, it proceeds to show an example of how through the same web lab a user is able to control a remote UR5 manipulator by setting a target pose goal with the MoveIt motion planner, thus demonstrating that the system is not limited to any specific single robot. Lastly, it shows the system’s functionality as a potential simulation playground.
Доступные форматы для скачивания:
Скачать видео mp4
-
Информация по загрузке:



















