Скачать
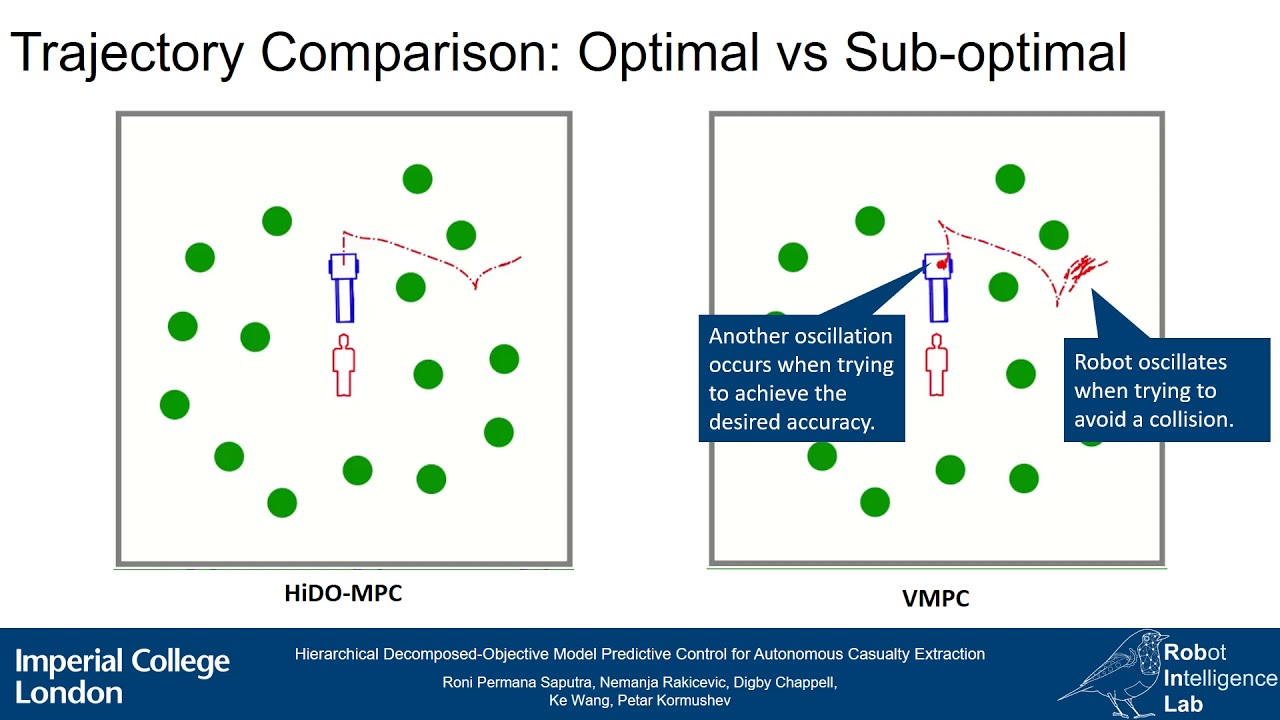
Hierarchical Decomposed-Objective Model Predictive Control for Autonomous Casualty Extraction
Автор: Robot Intelligence Lab
Загружено: 2021-04-28
Просмотров: 150
Описание:
Roni Permana Saputra, Nemanja Rakicevic, Digby Chappell, Ke Wang, Petar Kormushev, "Hierarchical Decomposed-Objective Model Predictive Control for Autonomous Casualty Extraction", In IEEE Access, IEEE, 2021.
https://ieeexplore.ieee.org/document/...
https://sites.google.com/view/hido-mp...
https://github.com/roni-permana-saput...
Доступные форматы для скачивания:
Скачать видео mp4
-
Информация по загрузке:


![[RA-L] Hierarchical Active Exploration of Radiance Field with Epistemic Uncertainty Minimization](https://image.4k-video.ru/id-video/FkY7t2IeWhE)



![[IROS2025] Robust Model Predictive Control for Quadruped Locomotion](https://image.4k-video.ru/id-video/v2vG4ZawwEY)












