Углы поворота для представления углов Эйлера (пример) — Основы робототехники
Автор: ThatsEngineering
Загружено: 2019-12-16
Просмотров: 54022
Углы поворота для представления углов Эйлера (пример с решением) — Основы робототехники
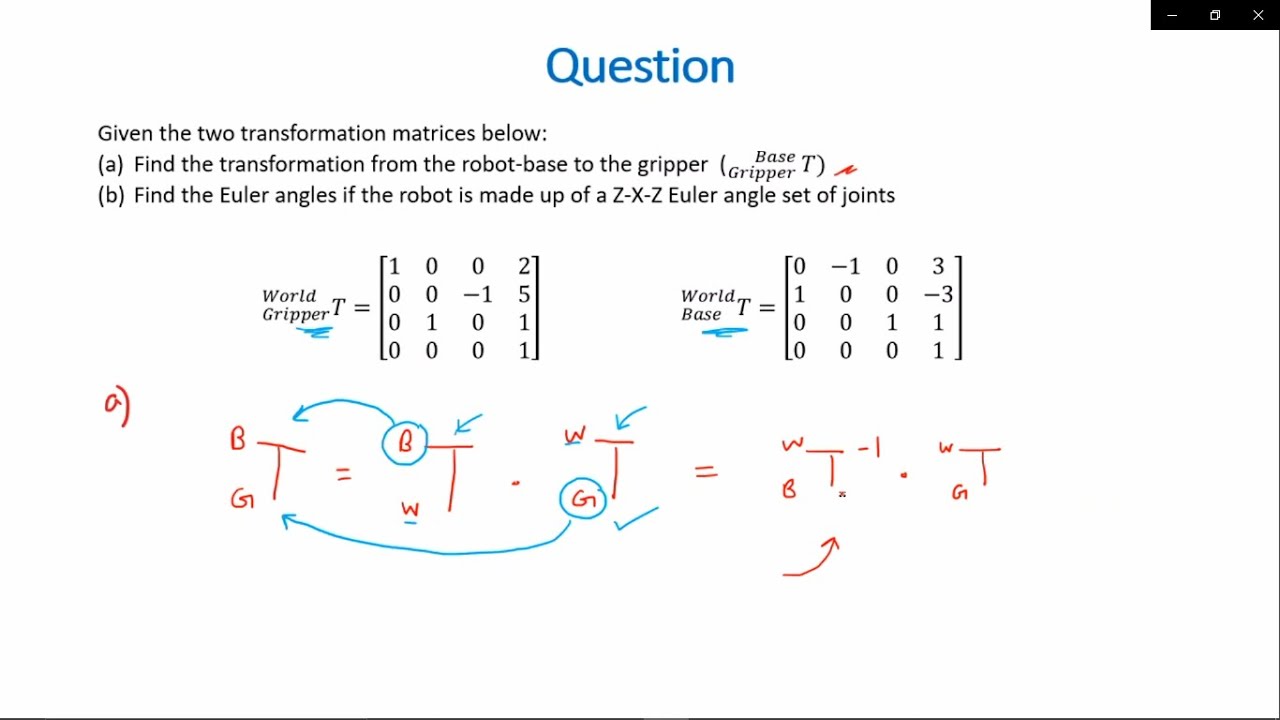
В этом примере рассматриваются составные матрицы преобразований и манипуляция ими между кадрами. Кроме того, углы поворота для заданного преобразования вычисляются с использованием представления углов Эйлера.
--------------------------------------------------------------------------------------------------------------------
Вступительная музыка:
Тема Дженни от Audionautix распространяется по лицензии Creative Commons Attribution (https://creativecommons.org/licenses/...)
Исполнитель: http://audionautix.com/
----------------------------------------------------------------------------------------------------------------------
Материал по теме взят из:
Джон Дж. Крейг, «Введение в робототехнику (механика и управление)». Pearson Education International.
-----------------------------------------------------------------------------------------------------------------------
Надеюсь, это видео поможет.
Если у вас есть вопросы, пожалуйста, оставляйте комментарии и не забудьте подписаться.
Всем привет!
Доступные форматы для скачивания:
Скачать видео mp4
-
Информация по загрузке:



















