Скачать
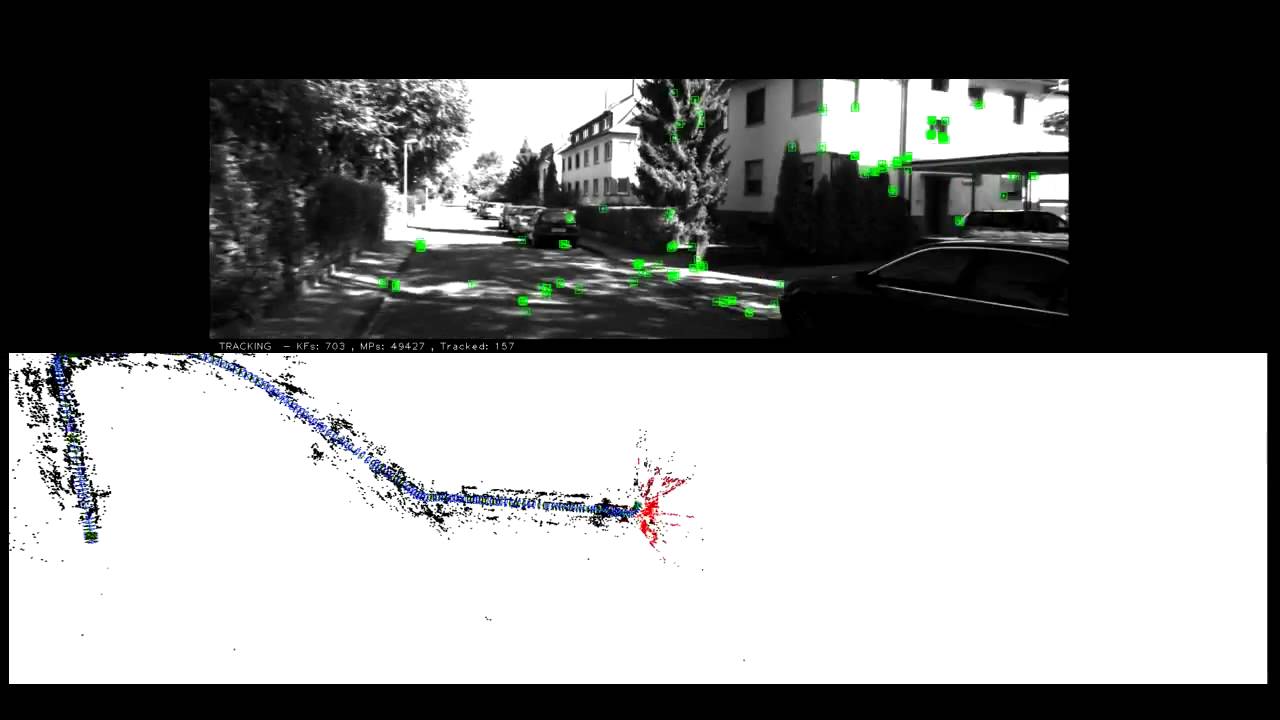
2D grid mapping and navigation with ORB-SLAM 2- KITTI Dataset
Автор: Ali Jahani
Загружено: 2017-05-12
Просмотров: 32664
Описание:
By using ORBSLAM and only monocular camera we were able to create a 2d occupancy grid map to eliminate the use of lidar to some point.
My Projects:
https://jahaniam.github.io/index.html...
Abhineet personal page :
http://webdocs.cs.ualberta.ca/~vis/as...
source code:
https://github.com/abhineet123/ORB_SLAM2

Доступные форматы для скачивания:
Скачать видео mp4
-
Информация по загрузке: