Скачать
Мой дипломный проект: гибкий робот-манипулятор
Автор: 𝐌Ξ 𝐂 𝐇 𝐀 𝐓 𝐑 𝐎 𝐍 𝐈 𝐂
Загружено: 2025-12-19
Просмотров: 43159
Описание:
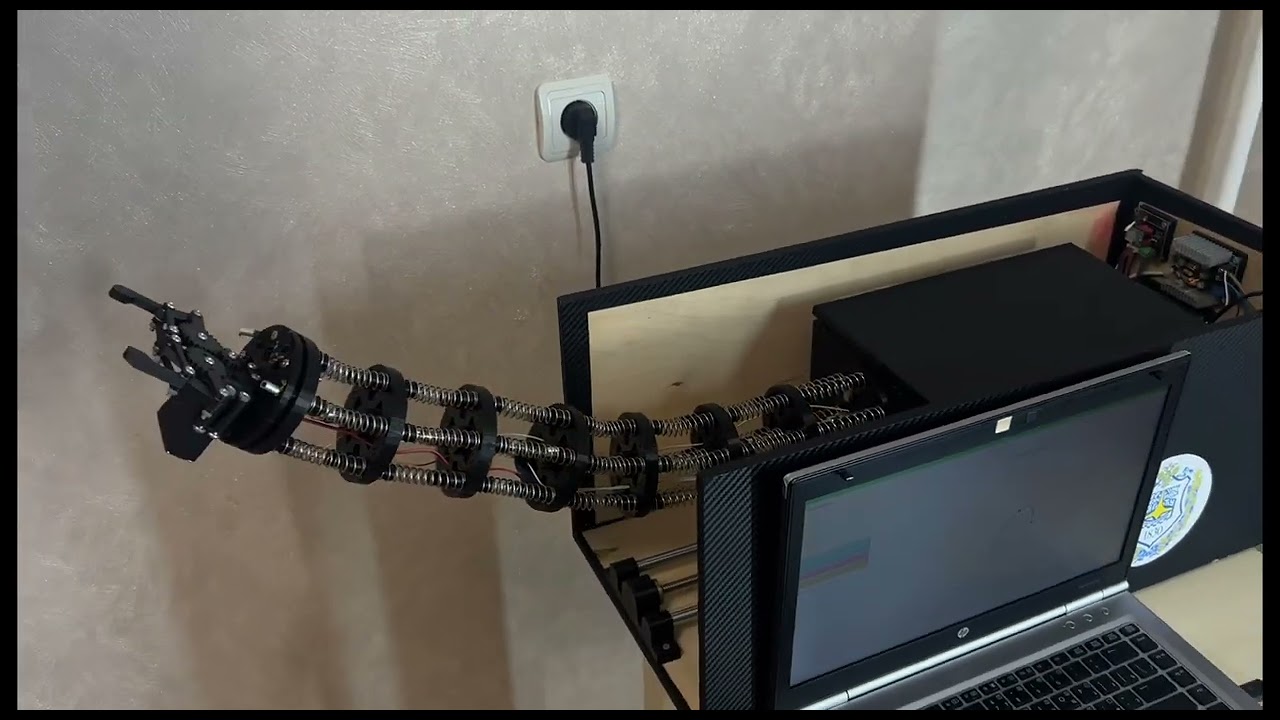
В этом видео я показываю свой дипломный проект — гибкий манипулятор (робот континуума).
Что в проекте:
— 2 управляемых звена
— тросовое управление
— ESP32
— сервоприводы + шаговый двигатель
— модель постоянной кривизны
Я буду выкладывать материалы по мехатронике, робототехнике и автоматизации.
Подписывайтесь :)
Доступные форматы для скачивания:
Скачать видео mp4
-
Информация по загрузке:













![Мы получили 2,5 млн рублей чтобы сделать экзоскелет, и это наконец закончилось [2/2]](https://image.4k-video.ru/id-video/X3uZq2joiW8)





