Jun Yang on 6D Pose Est. for Textureless Objects on RGB Frames using MV. Optimization | AIR Seminar
Автор: AI Robotics Seminar - University of Toronto
Загружено: 2022-11-23
Просмотров: 1523
Abstract:
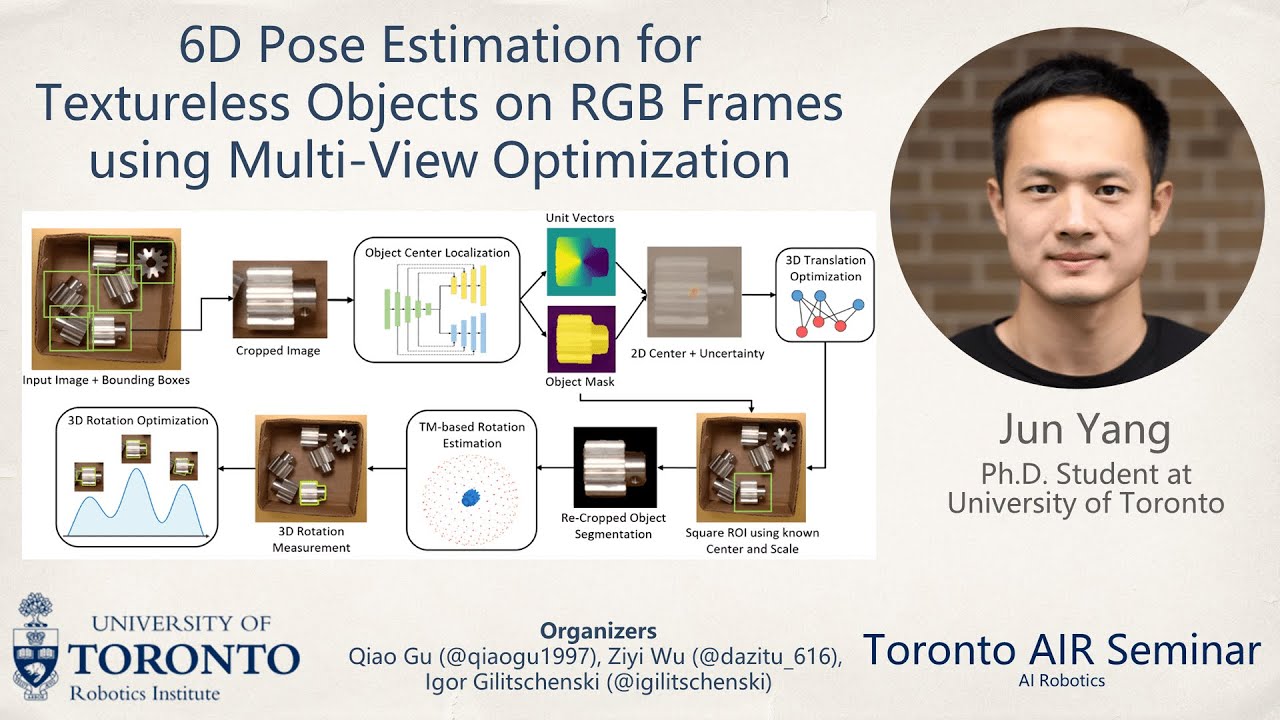
6D pose estimation of textureless objects is a valuable but challenging task for many robotic applications. In this work, we propose a framework to address this challenge using only RGB images acquired from multiple viewpoints. The core idea of our approach is to decouple 6D pose estimation into a sequential two-step process, first estimating the 3D translation and then the 3D rotation of each object. This decoupled formulation first resolves the scale and depth ambiguities in single RGB images and uses these estimates to accurately identify the object orientation in the second stage, which is greatly simplified with an accurate scale estimate. Moreover, to accommodate the multi-modal distribution present in rotation space, we develop an optimization scheme that explicitly handles object symmetries and counteracts measurement uncertainties. In comparison to the state-of-the art multi-view approach, we demonstrate that the proposed approach achieves substantial improvements on a challenging 6D pose estimation dataset for textureless objects.
Paper:
Yang, Jun, et al. "6D Pose Estimation for Textureless Objects on RGB Frames using Multi-View Optimization." arXiv preprint arXiv:2210.11554 (2022). https://arxiv.org/abs/2210.11554
Yang, Jun, et al. "ROBI: A multi-view dataset for reflective objects in robotic bin-picking." 2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). IEEE, 2021. https://arxiv.org/abs/2105.04112
Bio:
Jun Yang is a fourth year Ph.D. student in the Toronto Robotic and AI Lab (TRAIL) at the University of Toronto, Aerospace Studies. His research interests include computer vision, machine learning and robotics, with a focus of active perception for robotic grasping. He has 7 years of industrial research experience. Prior to this, he received his Master degree in Electrical and Computer Engineering from University of Ottawa in 2015.
Toronto AIR Seminar:
The Toronto AI Robotics Seminar Series is a set of events featuring young robotics and AI experts. The talks are given by local as well as global speakers and organized by the Faculty and Students at University of Toronto’s Department of Computer Science. We welcome students, researchers and robotics enthusiasts from around the world to join us and interact with the Toronto Robotics Community.
Find out more at: https://robotics.cs.toronto.edu/toron...
Доступные форматы для скачивания:
Скачать видео mp4
-
Информация по загрузке:









![UofT vMPI Interview [1 Hour Webinar] - Interview Preparation (Temerty Faculty of Medicine - Toronto)](https://image.4k-video.ru/id-video/1Fp4pQLSClg)









