Greg Sawick | Exo-Ankle
Автор: Michigan Engineering
Загружено: 2015-11-12
Просмотров: 5614
ME Department Seminar Series
A biologically inspired approach to lower-limb exoskeleton design
The goal of the Human Physiology of Wearable Robotics (PoWeR) Laboratory is to discover and exploit key principles of locomotion neuromechanics in order to build wearable devices that can
augment intact and/or restore impaired human locomotion. The primary performance goal of such devices is to reduce metabolic energy consumption of the user.
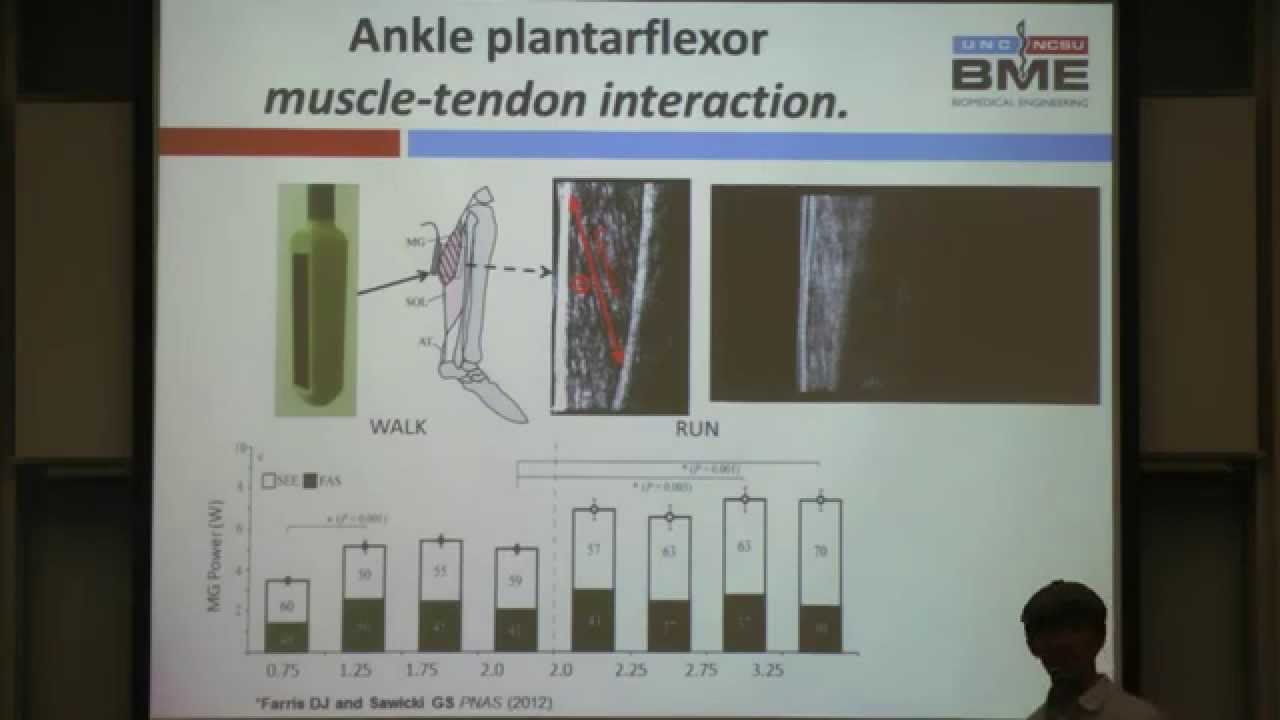
Our design approach is motivated by two key mechanisms observed in human gait that are crucial to efficient movement. The first is optimally timed, impulsive ankle joint ‘push-off’ for propelling the body forward. The second is the effective cycling of mechanical energy from the body’s center of mass to elastic tissues (i.e. tendon and aponeurosis) and back.
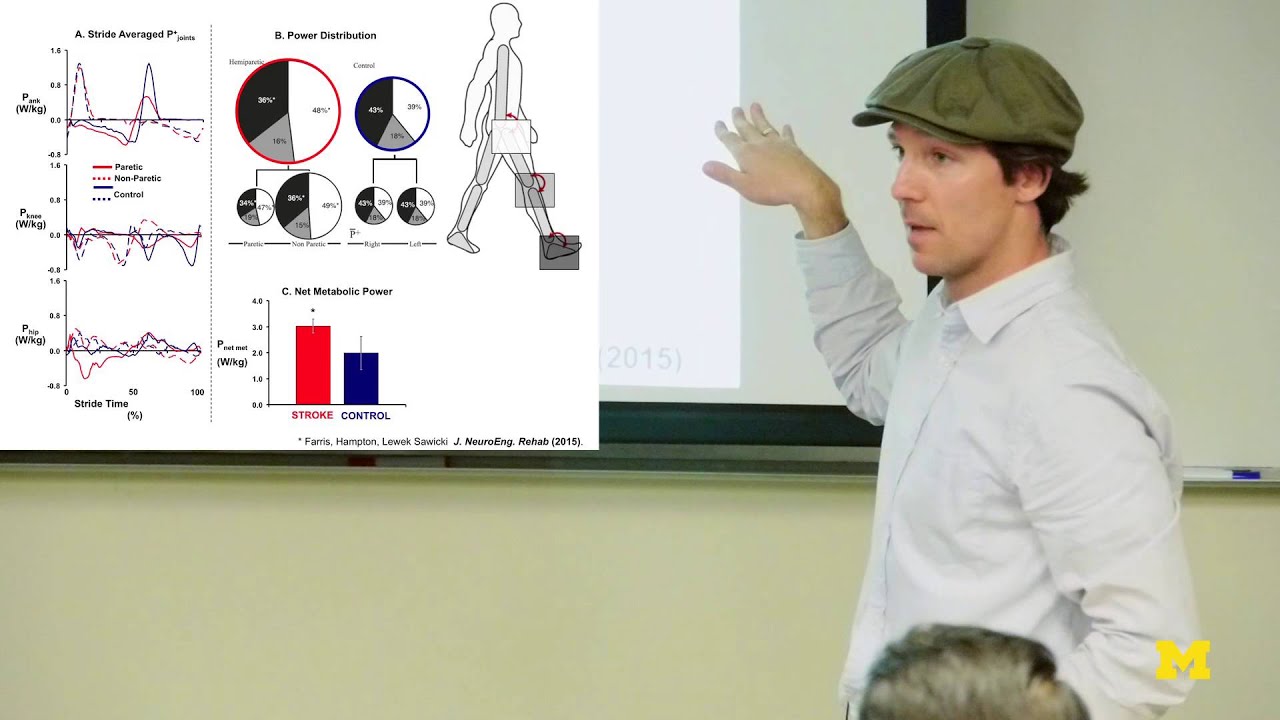
In the first part of the talk I will highlight our recent work using an in-lab, pneumatically powered ankle exoskeleton with a novel neuromechanics based controller to help stroke survivors
regain symmetric ‘push-off’ mechanics.Then, I will discuss
the motivation and basic science behind the design of a portable, passive elastic exoskeleton and novel clutching mechanism that can provide ‘a spring in your step’ by storage and release of elastic energy in a parallel elastic element worn about the ankle (i.e. exo-tendon) during human walking. We recently demonstrated that this device can reduce the metabolic cost of normal walking by ~7% below normal without adding any external energy from batteries or motors. We contend that simple, bio-inspired designs promise more functionality than current passive AFO product lines; and a cheaper, more practical alternative to fully powered lower-limb exoskeletons now coming to market.
Gregory S. Sawicki is an Associate Professor in the Joint Department of Biomedical Engineering at North Carolina State University and the University of North Carolina at Chapel Hill. He received a B.S. from Cornell University (1999) and a M.S. from the University of California-Davis (2001), both in Mechanical Engineering. Prior to his arrival at NC State in summer 2009, Dr. Sawicki completed his
Ph.D. in Human Neuromechanics at the University of Michigan, Ann Arbor (2007) and was an NIH funded Post Doctoral Fellow in Integrative Biology at Brown University (2007-2009).
Dr. Sawicki’s research area is Rehabilitation Engineering. He directs the Human Physiology of Wearable Robotics (PoWeR) laboratory focusing on uncovering fundamental principles of locomotion
mechanics, energetics and neural control in both healthy and impaired populations (e.g. stroke). The long term vision of the Human PoWeR lab is to exploit useful principles of human locomotion applying them to motivate bio-inspired designs for state of the art lower limb exoskeletons and
prostheses.
http://www.bme.ncsu.edu/labs/hpl/greg...
Доступные форматы для скачивания:
Скачать видео mp4
-
Информация по загрузке:













![[Webcast] - Biomechanical investigation of a passive upper extremity exoskeleton for manual handling](https://imager.clipsaver.ru/HSsvjouKIQQ/max.jpg)


