Feedback Control for Autonomous Riding of Hovershoes by a Cassie Bipedal Robot
Автор: Hybrid Robotics
Загружено: 2019-06-04
Просмотров: 86265
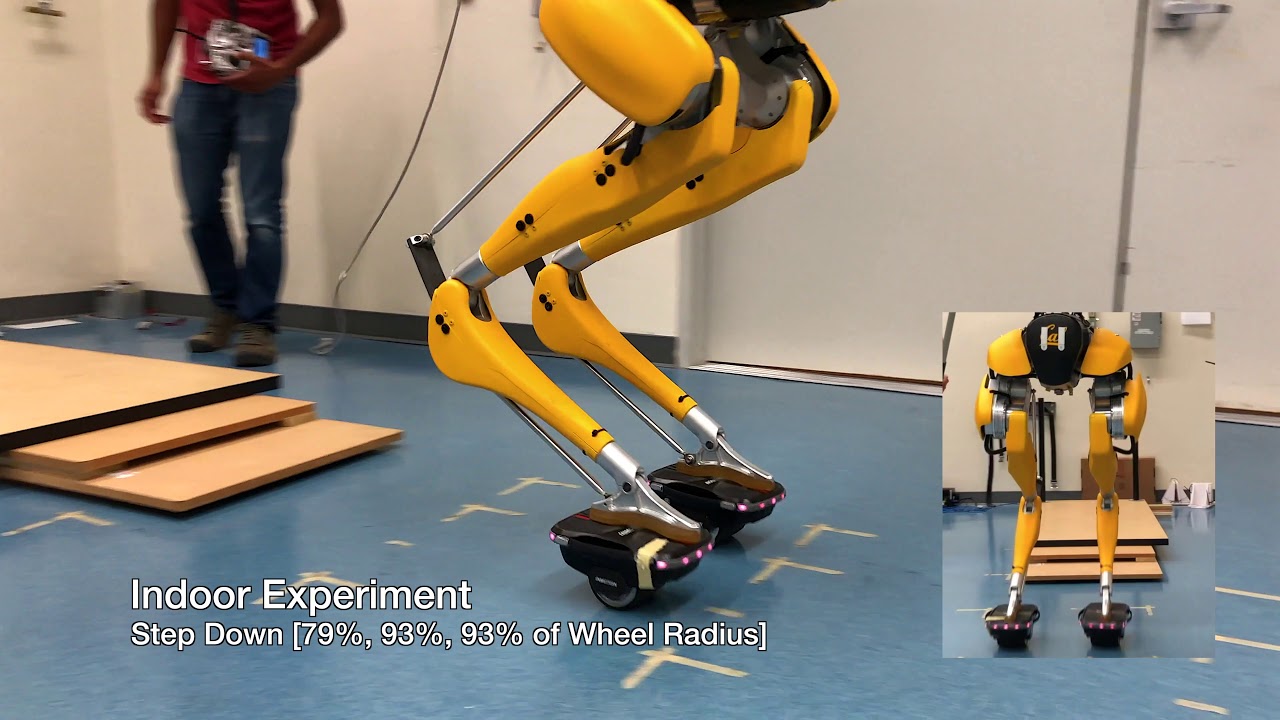
Cassie Cal autonomously riding a pair of Hovershoes: riding down a pair of stairs, riding on rough and uneven outdoor terrain, riding up and down steep inclines, autonomously navigating an obstacle course, and leaning into a turn to quickly go around corners.
While locomotion using legs is efficient when traveling over rough and discrete terrain, wheeled locomotion is more efficient when traveling over flat continuous terrain. Enabling legged robots to ride on various micro-mobility platforms will offer multimodal locomotion capabilities, improving the efficiency of locomotion over various terrain.
We created a framework for autonomous bipedal robotic locomotion using a wheeled platform. This framework includes a computer vision system, a path planner, and a feedback control strategy. We demonstrate our framework using the Cassie bipedal robot (manufactured by Agility Robotics) and Hovershoes (manufactured by InMotion).
In our experiments, we show the robustness of our controller through a variety of tasks, such as riding the Hovershoes down a few stairs, riding on rough and uneven outdoor terrain, riding up and down steep inclines, and leaning into a turn to quickly go around corners. Additionally, Cassie is also able to autonomously ride the Hovershoes and navigate through an obstacle course.
Cassie operates either by receiving translation and rotation velocity commands from an operator, or completely autonomously by detecting obstacles and planning paths around them to reach a goal location.
This work was funded in part by the National Science Foundation through NSF Grant IIS-1834557 and in part by the Berkeley Deep Drive.
Music: "Look Both Ways" by Birocratic (http://birocratic.lnk.to/allYL)
Доступные форматы для скачивания:
Скачать видео mp4
-
Информация по загрузке:



















