Monocular Visual-Inertial Odometry with Planar Regularities - Demonstration
Автор: Robot Perception and Navigation Group
Загружено: 2023-03-01
Просмотров: 2635
Accepted to ICRA 2023.
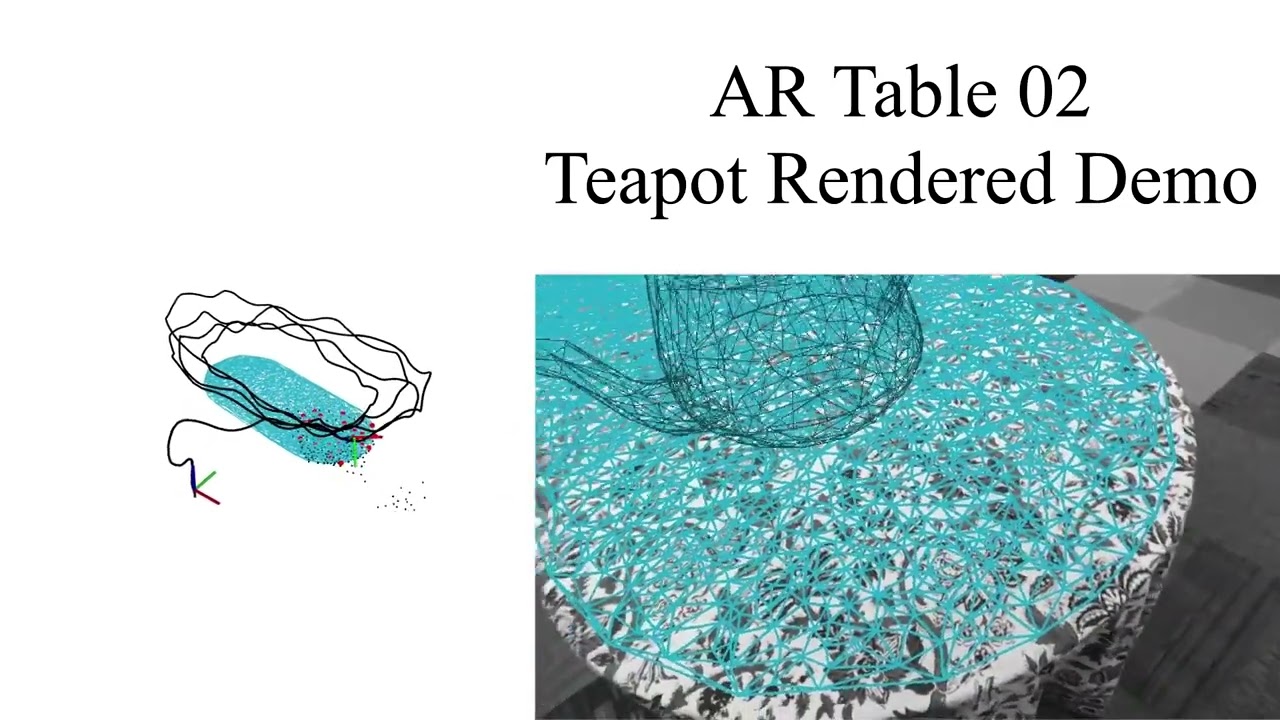
VIO trajectory can be seen in black with the global and camera frames.
Black points are the triangulated value by the ov_plane plane extraction algorithm.
SLAM point features are seen in red with a total of 30 being inserted into the state.
Lines represent point-on-plane regularities being enforces in an update and connect the current IMU position and the feature that was regularized to a plane.
The color of the line, mesh plane, visual plane detection, and AR render should all be unique to each plane being extracted and tracked.
Delaunay triangulation of sparse points is shown with the global normal for each triangle being shown in the overlaid color.
Extracted planes and their sparse features can also be seen with their convex hull being also drawn for clarity.
The AR display renders a teapot at the center of each plane when first seen.
Additionally, all past features that have laid on the plane have also been projected into the AR image.
Paper: https://pgeneva.com/downloads/papers/...
Code: https://github.com/rpng/ov_plane
Dataset: https://github.com/rpng/ar_table_dataset
Pitch Video: • Monocular Visual-Inertial Odometry with Pl...
Доступные форматы для скачивания:
Скачать видео mp4
-
Информация по загрузке:





![DM-VIO: Визуально-инерциальная одометрия с отложенной маргинализацией [Код онлайн]](https://image.4k-video.ru/id-video/7iep3BvcJPU)













