LIC-Fusion 2.0 - Presentation
Автор: Robot Perception and Navigation Group
Загружено: 2024-04-24
Просмотров: 246
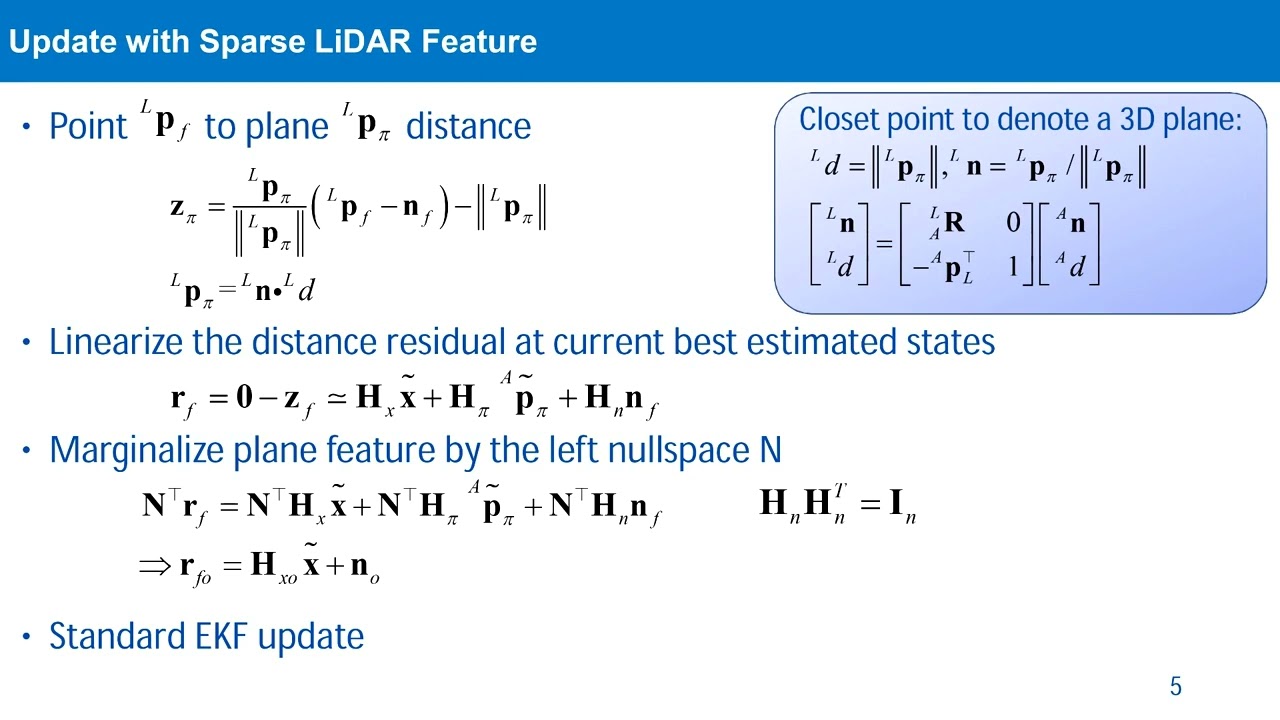
LIC-Fusion 2.0: LiDAR-Inertial-Camera Odometry with Sliding-Window Plane-Feature Tracking
Multi-sensor fusion of multi-modal measurements of commodity inertial, visual and LiDAR sensors to provide robust and accurate 6DOF pose estimation holds great potential in robotics and beyond. We develop a sliding-window filter based LiDAR-Inertial-Camera odometry with online spatiotemporal calibration (i.e., LIC-Fusion 2.0), which introduces a novel sliding-window plane-feature tracking for efficiently processing 3D LiDAR measurements. The reliable feature tracking prevent regenerating correspondences iteratively like ICP. The whole estimator becomes consistent (the estimation errors are within the 3 /sigma uncertainty bounds), which has been demonstrated in this simulation experiment inside a synthetic room.
LIC-Fusion 2.0 Paper:
https://arxiv.org/abs/2008.07196
Доступные форматы для скачивания:
Скачать видео mp4
-
Информация по загрузке:







![Как сжимаются изображения? [46 МБ ↘↘ 4,07 МБ] JPEG в деталях](https://image.4k-video.ru/id-video/Kv1Hiv3ox8I)











