FAI TALK Robert Platt: Symmetric Policy Learning in Robotics
Автор: Texas Robotics
Загружено: 2025-10-08
Просмотров: 105
Robert Platt (https://www.khoury.northeastern.edu/p...)
Associate Professor, Northeastern University
Title: Symmetric Policy Learning in Robotics
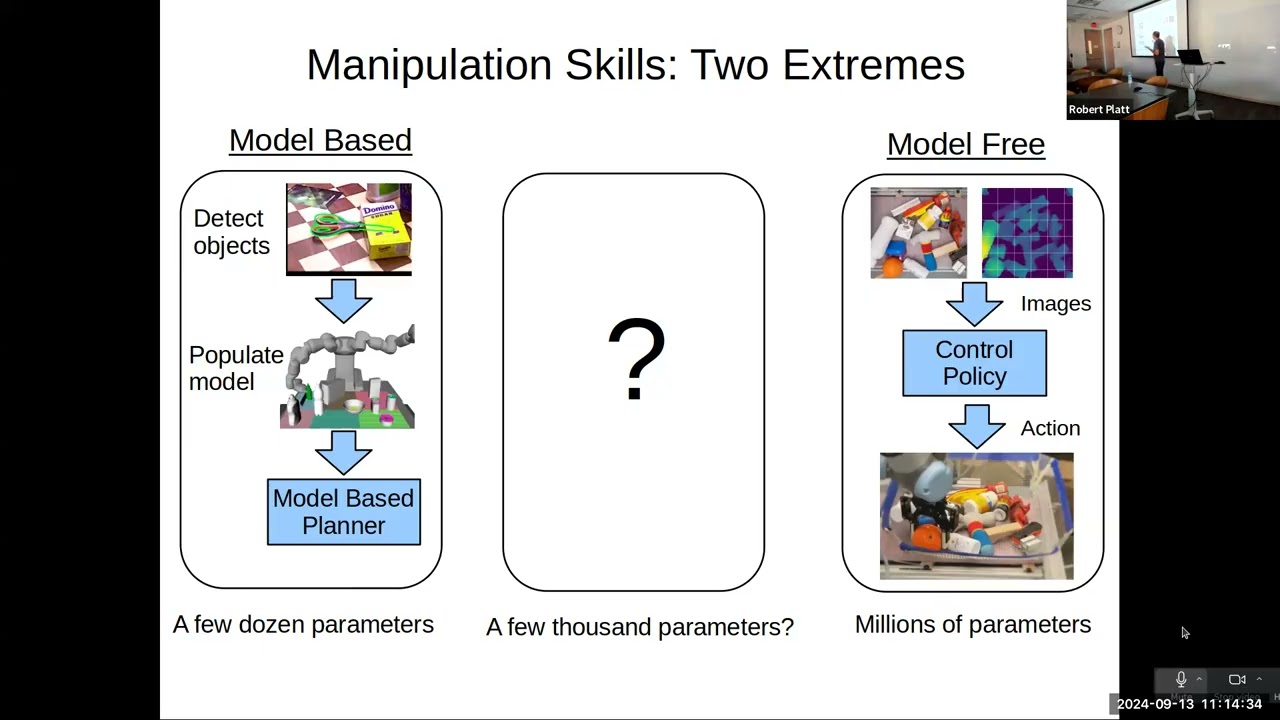
Abstract: Many robotics problems have transition dynamics that are symmetric in SE(2) and SE(3) with respect to rotation, translation, scaling, reflection, etc. In these situations, any optimal policy will also be symmetric over these transformations. In this talk, I leverage this insight to improve the data efficiency of policy learning by encoding domain symmetries directly into the neural network model using group invariant and equivariant layers. The result is that we can learn non-trivial visuomotor control policies with much less data than is typically the case. For imitation learning, this significantly reduces the number of demonstrations required. For reinforcement learning, it reduces the amount of experience needed to learn a good policy. In fact, we can sometimes learn good policies from scratch training directly on physical robotic hardware in real time.
About the speaker: Rob Platt is an Associate Professor in the Khoury College of Computer Sciences at Northeastern University and a Faculty Fellow at BDAII. He is interested in developing robots that can perform complex manipulation tasks alongside humans in the uncertain everyday world. Much of his work is at the intersection of robotic policy learning, planning, and perception. Prior to coming to Northeastern, he was a Research Scientist at MIT and a technical lead at NASA Johnson Space Center.
Learn more about FAI at The University of Texas at Austin: https://www.cs.utexas.edu/forum-for-ai
Доступные форматы для скачивания:
Скачать видео mp4
-
Информация по загрузке:















![[Full Workshop] Reinforcement Learning, Kernels, Reasoning, Quantization & Agents — Daniel Han](https://image.4k-video.ru/id-video/OkEGJ5G3foU)



