(Preview) MonoNav: MAV Navigation via Monocular Depth Estimation and Reconstruction
Автор: Intelligent Robot Motion Lab
Загружено: 2023-10-04
Просмотров: 4643
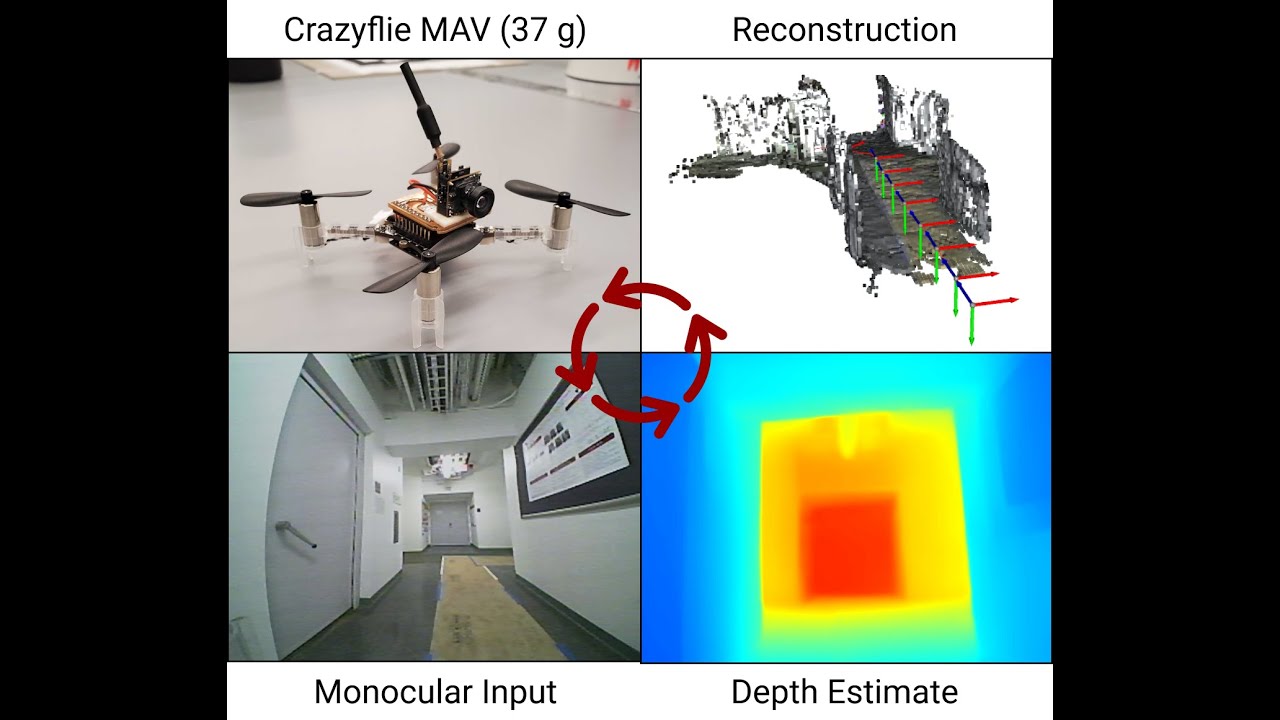
This is a research preview of the MonoNav system, which enables micro aerial vehicles, or MAVs, to fly in previously unseen environments.
MAVs are often constrained to use lightweight sensors - for perception, this means a tiny monocular camera. This renders many conventional planning techniques unusable. However, with access to offboard computation, MAVs can take advantage of recent advances in single-image depth estimation.
In this work, we show how MAVs can use pre-trained depth estimation tools to build a 3D reconstruction of its environment real-time, enabling the use of powerful planning tools.
Warning: This is a research preview for the Learning Robot Super Autonomy workshop at IROS2023. Work to compare MonoNav to state of the art baseline approaches is underway. Stay tuned!
For more information, please visit:
https://natesimon.github.io/mononav/
Доступные форматы для скачивания:
Скачать видео mp4
-
Информация по загрузке: