Enhancing Feature Tracking Reliability for Visual Navigation using Real-Time Safety Filter
Автор: LARR SNU
Загружено: 2025-01-29
Просмотров: 735
Title: Enhancing Feature Tracking Reliability for Visual Navigation using Real-Time Safety Filter
Status: International Conference on Robotics and Automation (ICRA) 2025 accepted
Category: visual navigation & active perception
Author: Dabin Kim*, Inkyu Jang*, Youngsoo Han, Sunwoo Hwang, and H. Jin Kim
Abstract:
Vision sensors are extensively used for localizing a robot's pose, particularly in environments where global localization tools such as GPS or motion capture systems are unavailable. In many visual navigation systems, localization is achieved by detecting and tracking visual features or landmarks, which provide information about the sensor's relative pose. For reliable feature tracking and
accurate pose estimation, it is crucial to maintain
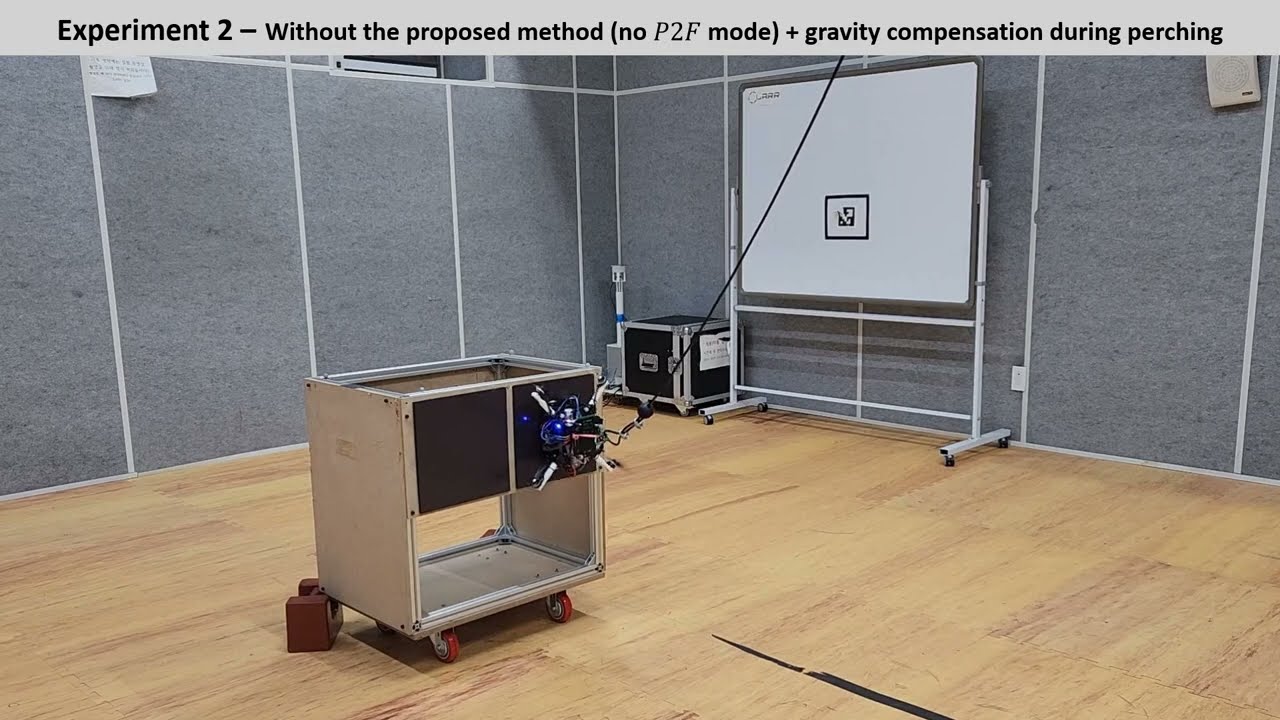
visibility of a sufficient number of features. This requirement can sometimes conflict with the robot's overall task objective. In this paper, we approach it as a constrained control problem. By leveraging the invariance properties of visibility constraints within the robot's kinematic model, we propose a real-time safety filter based on quadratic programming. This filter takes a reference velocity command as input and produces a modified velocity that minimally deviates from the reference while ensuring the information score from the currently visible features remains above a user-specified threshold. Numerical simulations demonstrate that the proposed safety filter preserves the invariance condition and ensures the visibility of more features than the required minimum. We also validated its real-world performance by integrating it into a visual simultaneous localization and mapping (SLAM) algorithm, where it maintained high estimation quality in challenging environments, outperforming a simple tracking controller.
Contact: dabin404@snu.ac.kr

Доступные форматы для скачивания:
Скачать видео mp4
-
Информация по загрузке:







![[RA-L] Hierarchical Active Exploration of Radiance Field with Epistemic Uncertainty Minimization](https://imager.clipsaver.ru/FkY7t2IeWhE/max.jpg)