Скачать
#Modèle
Автор: Dalila Djoudi
Загружено: 2023-01-09
Просмотров: 6469
Описание:
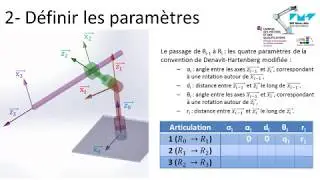
#Modèle #géométrique des #robots #serie : 1 #parametres #DH #denavit #hartenberg
#serial #robots #robotics #model #kinematic #DH #table #parameters
نمذجة الذراع الالية
الوصف الهندسي
جدول الوسائط الهندسية للروبوت المتسلسل

Доступные форматы для скачивания:
Скачать видео mp4
-
Информация по загрузке: