Скачать
Repérage et paramètres selon la convention de Denavit Hartenberg Modifiée
Автор: CMQ PTMS
Загружено: 2018-11-12
Просмотров: 33682
Описание:
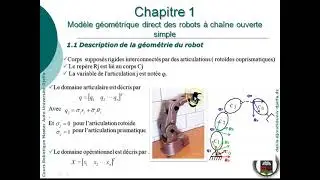
Cours Robotique : Modélisation géométrique des robots
Explication du repérage et des paramètres selon la convention de Denavit Hartenberg Modifiée à l'aide d'un exemple : le robot Stanford

Доступные форматы для скачивания:
Скачать видео mp4
-
Информация по загрузке: