Скачать
Méthode de Denavit Hartenberg modifiée (convention Khalil Kleinfinger)
Автор: Juste Un Petit Cours
Загружено: 2021-02-04
Просмотров: 13277
Описание:
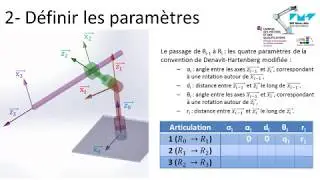
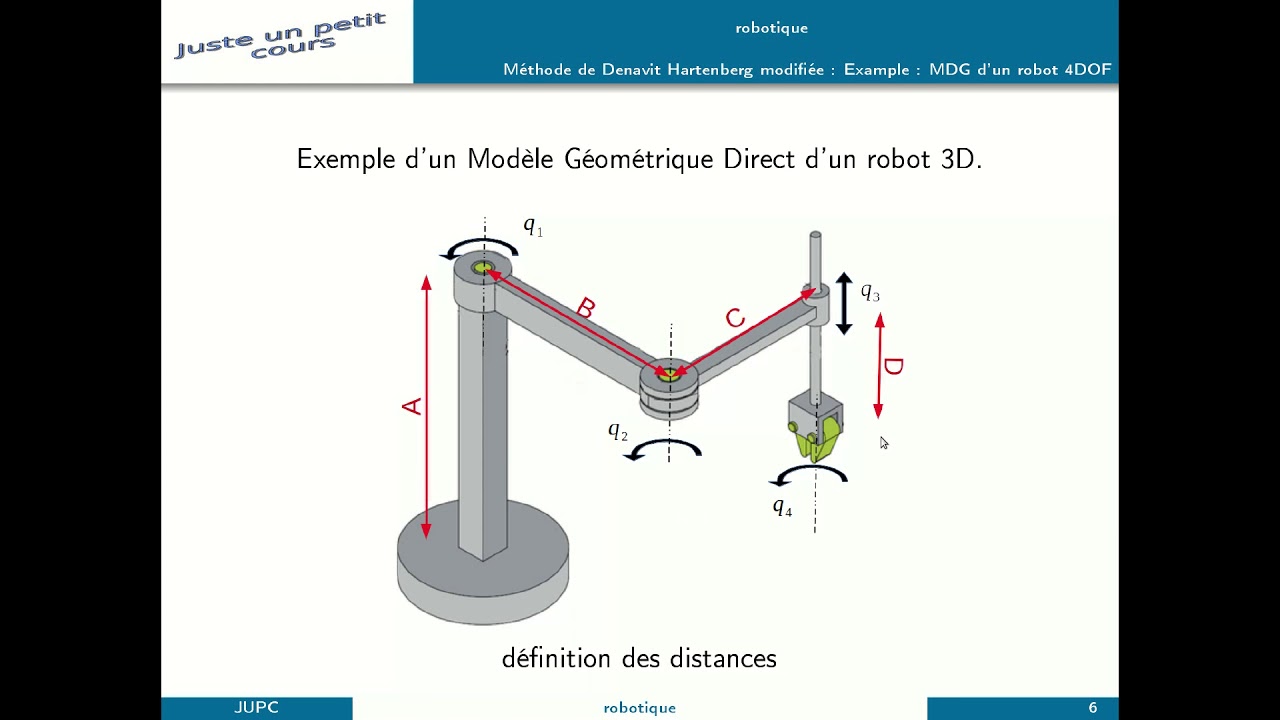
Cette vidéo présente la méthode de Denavit Hartenberg modifiée (Khalil Kleinfinger) pour le placement des axes et le modèle géométrique direct d'un robot manipulateur.
Attention, ce n''est pas la méthode "historique" qui est présentée : • Méthode de Denavit Hartenberg
Доступные форматы для скачивания:
Скачать видео mp4
-
Информация по загрузке: