Drone Control and the Complementary Filter
Автор: Brian Douglas
Загружено: 2018-11-05
Просмотров: 133751
Find all of my other videos here: https://engineeringmedia.com/videos
Get the map of control theory: https://www.redbubble.com/shop/ap/550...
Download eBook on the fundamentals of control theory (in progress): https://engineeringmedia.com
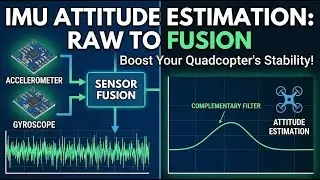
Let's talk about the complementary filter and how we can use it to estimate the attitude of a drone using an IMU. It is such a dead simple filter, which is a good reason to learn it, but it’s also practical because it produces nice results when blending measurements from two different sensors.
Check out my videos on Drone Simulation and Control: http://bit.ly/2OnlW5m
Website - www.engineeringmedia.com
Patreon - / briandouglas
Twitter - @brianbdouglas
Email - controlsystemlectures@gmail.com
Errata:
~2:23 - I state that the accelerometer is measuring the acceleration due to gravity, when in fact it's measuring the acceleration caused by the normal force from the ground. So it's directly up and the exact opposite direction of gravity! Whereas, an accelerometer in free fall would measure no acceleration at all even though it would be accelerating. So the "convert to angle" block would also take care of this sign flip.
Don't forget to subscribe!
If you have any questions on it leave them in the comment section below or on Twitter and I'll try my best to answer them.
I will be loading a new video whenever I can and welcome suggestions for new topics. Please leave a comment or question below and I will do my best to address it. Thanks for watching!

Доступные форматы для скачивания:
Скачать видео mp4
-
Информация по загрузке: